一组研究人员最近在《华尔街日报》发表了一篇论文自然通讯回顾了微型机器人的制造使用三维(3 d)印刷方法和他们的应用程序。
研究:3 d打印的微型机器人从设计到翻译。图片来源:Siwakorn TH / Shutterstock.com
背景
微型机器人在科学界引起了重大的关注由于他们的特殊能力来执行任务在人体难以达及的网站。这些机器人可以在群上或单独和动作的精确成像,手术,抽样,和药物输送应用。微型机器人也可以用于环境的应用程序,例如水处理。
最近的事态发展在3 d打印机允许高分辨率微型机扑制造与设计生产周转时间更短。具体地说,这些打印机是最适合用户缺乏广泛的技能。
在这项研究中,作者回顾了最新的3 d打印的微型机器人的应用,简要讨论了微型机扑驱动方法,观察了3 d打印技术和材料用于微型机扑制造。亚博网站下载作者还讨论了集成微型机器人与智能材料的优点和实现物理情报(PI)和人工智能(AI)在这些机器人。亚博网站下载
亚博网站下载
蛋白质聚合物,包括自然、photo-cross-linkable水凝胶和感光性树脂广泛用于微型机扑制造使用3 d打印技术。其中,光敏聚合物更有益,因为他们可以使用激光打印到3 d对象通过光化学反应的方法。
光敏聚合物等材料添加剂、单亚博网站下载体和剂常用于激光打印。SU-8, epoxy-based负光刻胶,IP-series光阻,一组标准photopolymerizable,通常用于高分辨率三维精密加工。
六面体的多功能微型机器人、微型磁机器人和游泳微型机器人的使用SU-8光刻胶用于靶向细胞交付,交付和运输的目标细胞,分别和有针对性的货物运输。
磁螺旋microswimmers、光控的微型机器人和螺旋游泳微型机器人的使用IP-L780用于有针对性的基因传递,显微外科,单细胞,目标,和remotely-guided药物输送。
磁微型机器人、microswimmers和磁性微米制造使用IP-Dip用于移植的干细胞,单粒子操纵,和有针对性的放电,交通,分别和捕获的能动的精子。
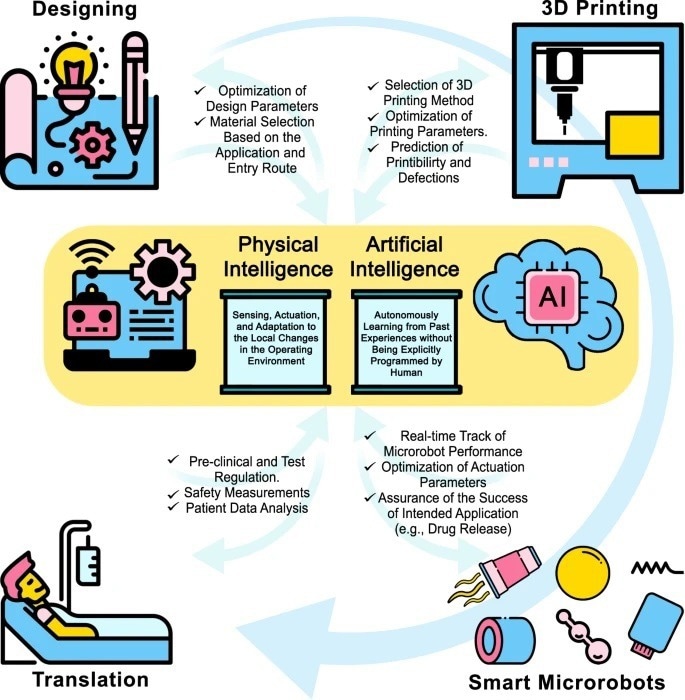
从台微型机扑到床边的示意图。设计和材料选择过程可以被人工智能辅助和π到设计一个特定于应用程序的设备。人工智能还可以提高3 d印刷过程中通过优化参数,以减少印刷缺陷。在应用阶段,人工智能可以帮助临床医生追踪微型机器人由优化驱动参数,提高可操作性,以确保适当的功能。另一方面,π允许微型机器人不同的刺激的环境意识和独立应对这些刺激(例如,药物释放在一个特定的pH值在目标站点)。为了翻译概念验证微型机器人临床医疗设备,新的微型机器人必须经过标准测试,以确保安全的短期和长期使用人体。然而,这些测试需要繁琐和昂贵的过程,这延迟微型机器人的快速翻译。因此,除了开发新材料、制备方法、及驱动方式,更简单的测试程亚博网站下载序应该提出截断当前测试过程的同时保持安全的因素。一些元素在无花果。1设计使用资源从Flaticon.com。图片来源:达巴格,S.R. et al .,自然
3 d Printing-based微型机扑制造方法
3 d打印方法通常用于微型机扑熔融沉积制造包括建模(FDM)喷墨3 d印刷、microextrusion 3 d印刷、选择性激光烧结(SLS),激光正向传递(电梯),直接激光写作(DLW),连续生产液体界面(夹),数字光处理(DLP)和有限元(SLA)。
SLA
微型机器人10μm分辨率使用SLA 3 d打印技术。树脂,包括混合聚合物催化单体特区500年DC100, DM 220, GM-08到基于sla的制造过程中使用。
良好的精度和表面质量,高品质,精细的空间分辨率的主要优势是使用SLA微型机扑制造技术。然而,印刷速度缓慢,高昂的成本和有限的选择材料的主要局限性SLA技术。
DLP
微型机器人与25 - 100μm分辨率使用DLP技术是可以伪造的。亚博网站下载材料在这个3 d打印技术包括超级蜡,超级阵容,acrylate-based树脂、环氧化合物、钻石微粒。yabo214
增值税低要求初始体积,更快的打印和更少的氧气干扰的影响SLA相比,低成本,印刷精度高使用DLP技术的主要好处。印刷结构的力学性能差的主要缺点是技术。
剪辑
微型机器人与75μm分辨率打印使用剪辑技术。氰酸酯、弹性聚氨酯、灵活的聚氨酯硬质聚氨酯,丙烯酸酯用于制造微型机器人在这个方法中。剪辑技术和DLP相比有更高的生产速度。需要与低粘度树脂的方法,这是一个重大的缺点。
DLW
两个或多光子聚合(TPP / MPP)技术可用于制造微型机器人使用丙烯酸酯100纳米的分辨率。高空间分辨率的关键优势这一过程,而较低的印刷速度和有限的选择是该技术的主要限制。
电梯
微型机器人10μm分辨率打印使用电梯的方法。金属配合物和水凝胶材料通常用于LIFT-based微型机扑亚博网站下载制造过程。
广泛的材料选择和精细打印分辨率是电梯技术的主要优势。这种技术还可以与不同的印刷油墨粘度和嵌入粒子。yabo214缓慢的制造过程是该方法的最显著的缺点。
其他3 d打印的方法
微型机器人在50 - 200μm分辨率可以用SLS捏造,喷墨3 d印刷、FDM, microextrusion 3 d印刷。其中,SLS和FDM有几个局限性微型机扑制造相比,喷墨3 d印刷和microextrusion 3 d。
3 d打印的微型机器人的应用程序
环境的应用程序
水处理
微型机器人可以消除和检测重金属离子,消除危险的微生物,消除有机污染,和吸收油滴在水处理。此外,sunlight-actuated decontaminator微型机器人可以分布在地表水资源不需要外部电源。
然而,回收和回忆微型机器人是困难的在他们分布在大型水库。此外,微型机器人不能长途旅行,通常在米的范围,使用当前的驱动方法。
生物医学应用
传感器和执行器
微型机器人可以方便精确和快速的操作,可以结合多个传感机制和操作使用场外的和车载驱动方法。然而,金属零件在微型机器人的使用可能会导致体内和体外毒性。微型机器人还可以提供不准确的测量,因为他们易受小环境参数的变化。
药物输送
微型机器人可以释放药物在特定网站的特定的环境属性或在接收外部的刺激,如声或磁脉冲和选择性/可控降解药物后交付。
此外,微型机扑成群适合大规模药物输送。然而,微型机器人和药物输送不足的部分降解的主要缺点是由于驱动方法的局限性在药物输送中使用微型机器人。
粒子监测/跟踪和成像
微型机器人可以用于体内的实时跟踪和成像。着色微型机器人是用来提高监测精度,而无需复杂的功能化的步骤。然而,微型机器人可以显示为一个云由于有限的空间分辨率。此外,粒子跟踪能力的微型机器人可以根据成像系统的操作范围有限。
组织再生和手术是其他生物医学应用程序在微型机器人发挥重要作用。
驱动方法
体内和体外驱动的微型机器人是相当具有挑战性的由于他们的亚毫米尺度相关的限制。推进机制必须产生足够的力量来克服粘滞力的生物相容性和结构完整性的前提下微型机器人。
驱动方法分为场外的和车载方法。自行的微型机器人/微型机器人,预装车载驱动使用的生物或化学电源对推进他们在操作环境与特定的物质反应,无需任何外部驱动。
Microorganism-based驱动和化学驱动板上驱动的例子。场外的驱动方法使用外力字段,如电气、光学、超声波、声、和/或磁动力,驱动微型机器人在射流环境中。
磁驱动是使用最广泛,特别是在生物医学应用中,由于其可接受的组织穿透深度,操作简单,精确控制,和可用性。然而,由于有限的光学驱动被认为是更适合组织的渗透。
翻译的挑战
微型机器人的性能和生产必须考虑和优化体内有效地将其从实验室到临床设置。这些方面包括选择适当的微型机扑设计基于特定于应用程序的设计策略,生物相容性和生物可降解材料,适当的制造方法,有效的驱动和控制方法,兼容现有的医学成像方法和目的执行医疗任务的能力。亚博网站下载
结论
总而言之,微型机器人展示了巨大的潜力在环境和生物医学应用。然而,还需要更多的研究来发展更快的3 d打印微型机扑制造方法在不影响打印分辨率。此外,一个全面的测试程序必须为微型机器人设计减少电流测试方法同时确保安全。
未来的前景
最近的3 d打印技术的进步使得公司的几种智能材料在微型机器人。亚博网站下载层不同的智能材料,如nanomaterial-bas亚博网站下载ed复合材料、形状记忆合金、生物材料,展示自我修复stimuli-responsive聚合物,self-actuating,感知,和变形和/或信号生成能力以应对外界刺激可以利用微型机器人实现行为如愈合、传感、选择性变形、适应、退化、推进,热生成,和冷却。
人工智能的集成方法,深度学习和机器学习等,进入微型机扑3 d印刷过程可以使研究人员能够实现最优的微型机扑性能,同时优化所需的材料和印刷时间。π是另一种方法来改善微型机扑性能变化而在当地的环境。这种方法可以使微型机器人学习,行动,控制、解释和自主意识,不断。
源
达巴格,狭义相对论。Sarabi,核磁共振、Birtek M.T.等。3 d打印的微型机器人从设计到翻译。自然通讯2022年。https://www.nature.com/yabo214articles/s41467 - 022 - 33409 - 3
免责声明:这里的观点是作者表达他们的私人能力,不一定代表AZoM.com T /有限的观点AZoNetwork这个网站的所有者和经营者。这个声明的一部分条款和条件本网站的使用。