在期刊上写作聚合物来自中国科学家团队为软机器人应用设计了一个新型的模块,该模块结合了超螺旋聚合物人造肌肉弦。在研究中,已经根据模块构建了软机器人,为将来的研究奠定了基础。
学习:基于超螺旋聚合物人造肌肉弦的本体感受软机器人模块。图片来源:Yurchanka Siarhei/Shutterstock.com
软机器人
动物使用软组织(例如肌肉)提供运动和其他重要功能。软组织的机械性能使动物可以存储能量,垫子的影响并适应其环境。
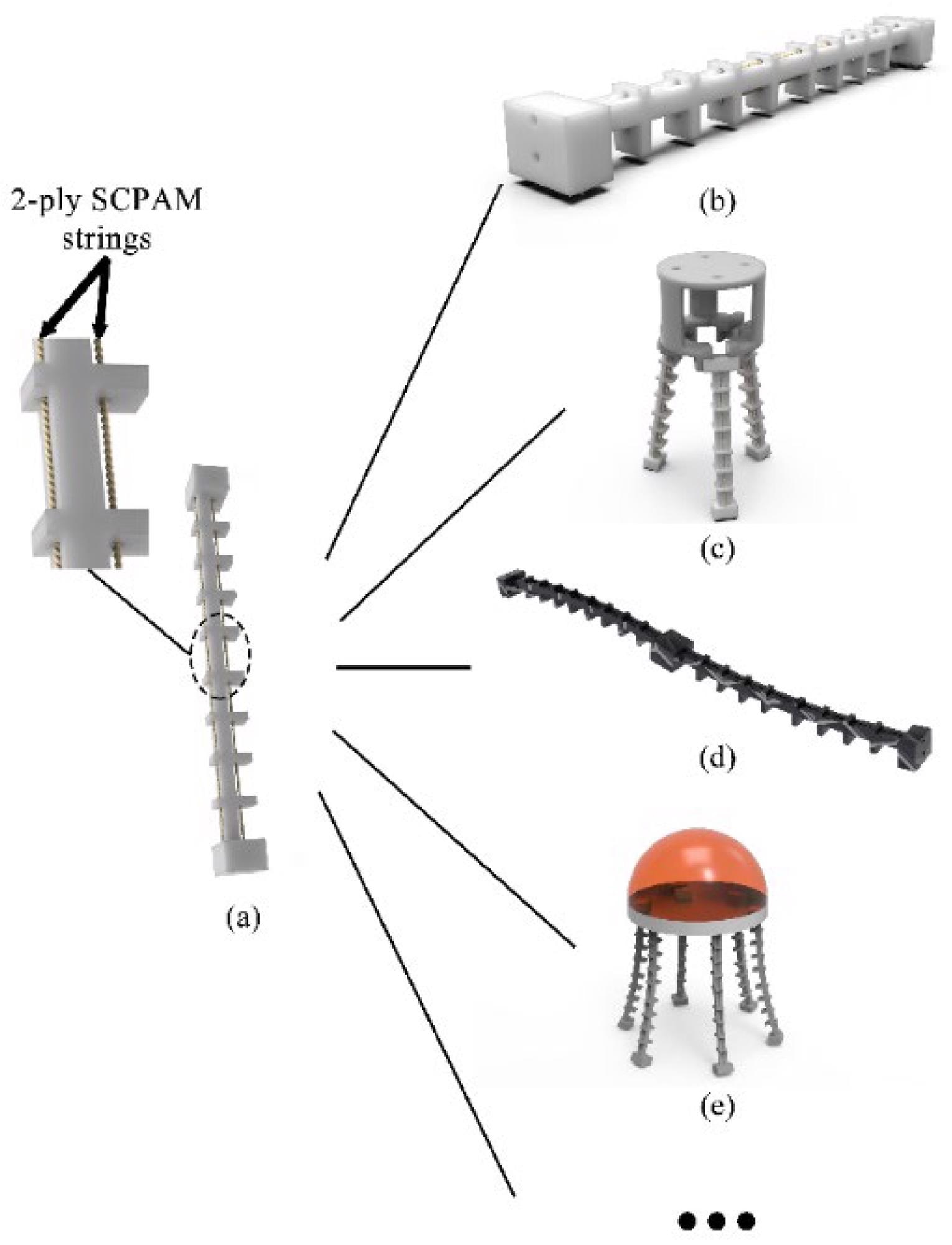
由模块配置的单个软机器人模块和软机器人。(A)单个软机器人模块和室以配置执行器和传感器。(b)一个由英寸虫启发的爬行机器人。(C)软机器人抓手。(d)类似蛇的操纵器。(e)水母风格的机器人具有水下游泳能力。图片来源:Yang,Y等,聚合物
近几十年来,已经设计了许多软机器人,可以模仿动物并实现仿生运动。结合生物添加的软性人造组件可以使这些机器人适应非结构化的环境,并为它们增强的灵活性和合规性。最近针对这些高级机器人的研究已经探索了许多应用程序。
软机器人使用不同的材料和技术来利用不同的致动法,包括气动执行器,形状的记忆合金,人造肌腱,形状的记忆聚合物,液晶液晶执行器和离子聚合物 - 金亚博网站下载属复合材料。
软机器人中的模块化
软机器人技术的最新趋势是使用模块来构建具有不同功能的一般自适应软机器人,具体取决于其要求。可以在模块化软机器人中使用不同的驱动方法,每种方法都具有其自身的好处和缺点。
例如,气动执行器柔软并且具有生物相容性,但它们通常需要繁琐的配件,例如空气压缩机,从而限制了它们在独立的软机器人系统中的应用。形状的记忆聚合物致动器具有生物相容性,高应变恢复和生物降解性,但它们的响应时间很长。
液晶致动器具有优异的机械性能和各向异性行为,但是这些执行器的处理技术仍处于起步阶段。软金属合金具有高功率密度,低工作电压和高可逆性,但是由于它们不是软材料,因此在相变时发生滞后。亚博网站下载
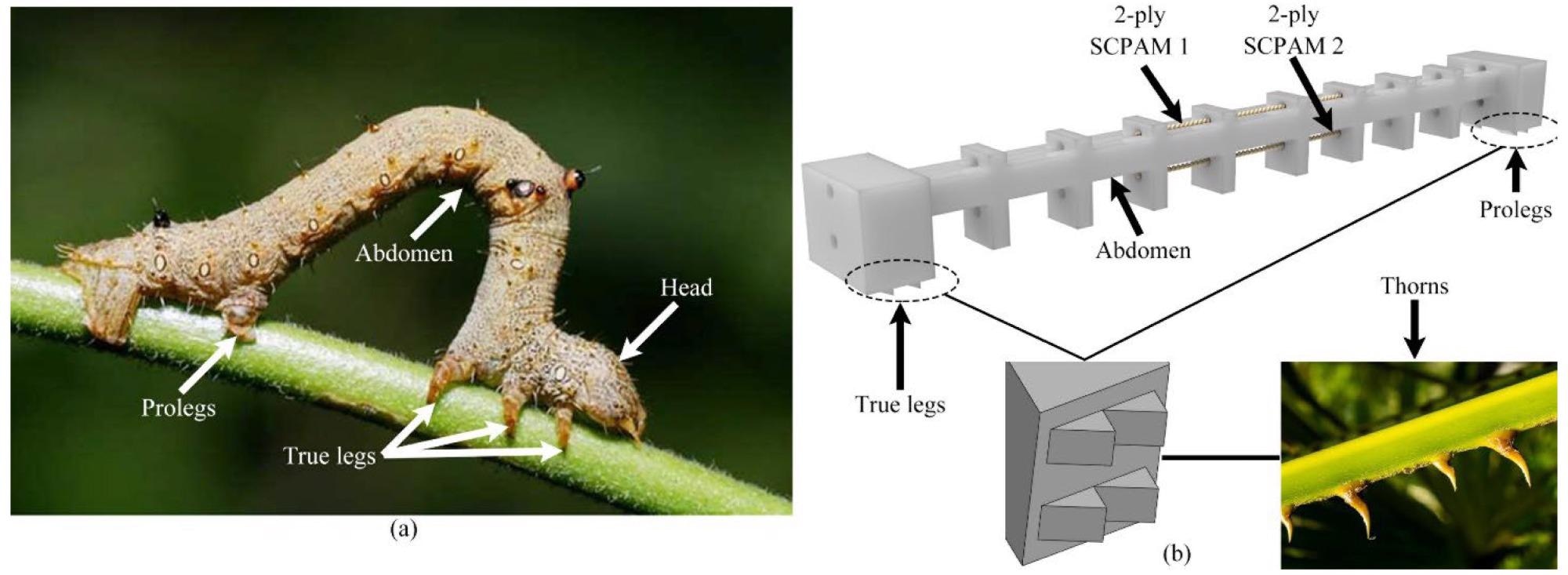
爬行机器人设计的灵感。((A)一个爬行的nind虫及其组织。((b)软机器人模型和机器人腿部设计的灵感来源。图片来源:Yang,Y等,聚合物
选择正确的执行器类型是管理系统性能的关键因素。近年来,已经开发了几种类型的软机器人,包括抓手,操纵者,游泳者和爬行者,利用了几种类型的执行器模块。
超螺旋聚合物人造肌肉
超螺旋聚合物人造肌肉是最近提出的用于软机器人中使用的模块的驱动方法。这些人造肌肉是通过不断扭曲的聚合物线或纤维来构建的,并为软机器人设计提供了一种新颖的解决方案,该解决方案通过其他驱动方法克服了问题。
这些人造肌肉已经在软机器人中发现了应用,包括游泳,爬行和抓握。此外,已经设计了多功能模块,以利用超螺旋聚合物人造肌肉。科学家最近报道了这些人造肌肉用作内部应变传感器。
尽管几项研究研究了这些人造肌肉作为致动器或传感器的能力,但缺乏对使用超螺旋聚合物人工肌肉的综合致动感系统的研究。
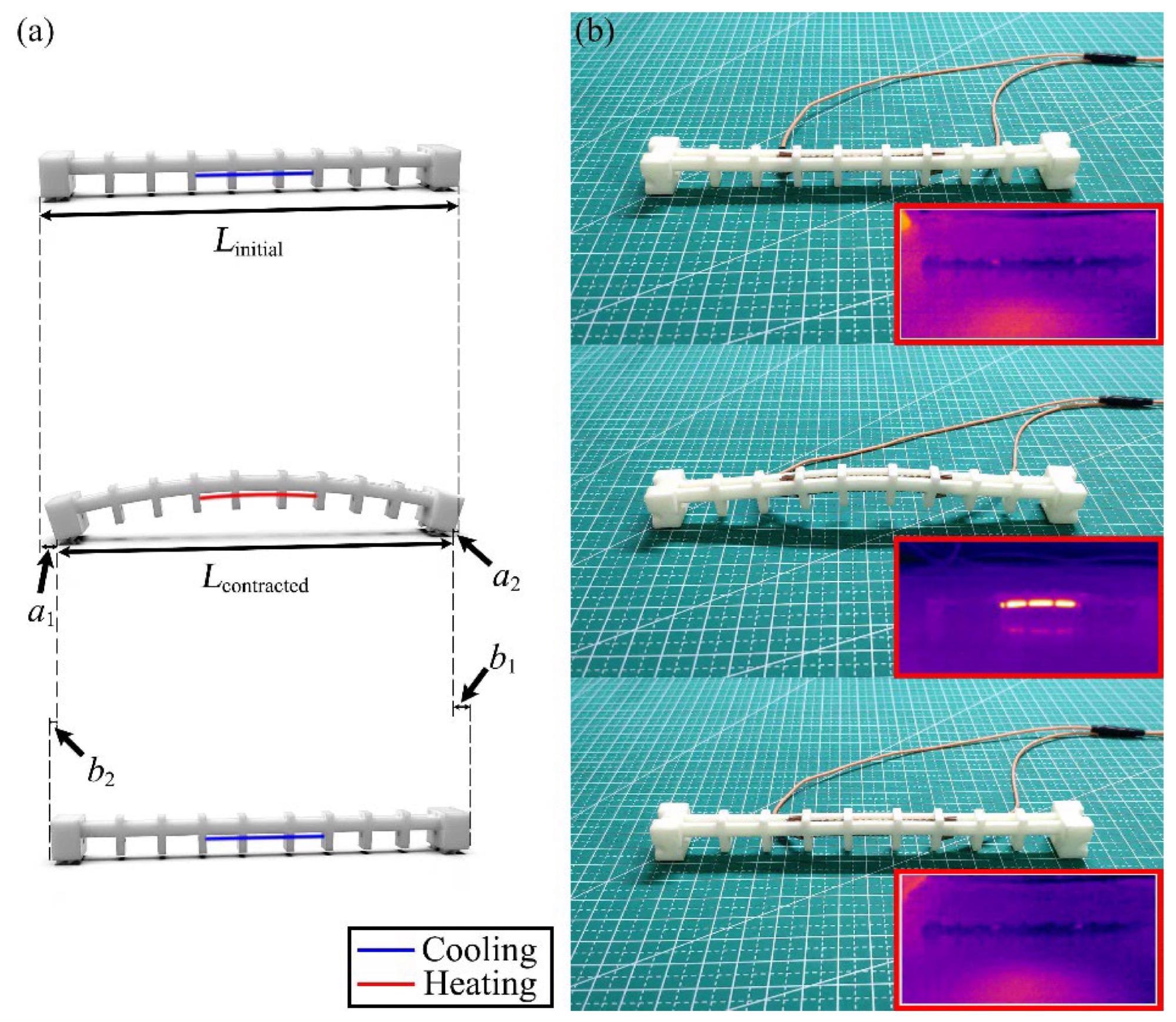
爬行机器人的运动效率分析。((A)在爬行机器人的一个运动周期中的示意图。机器人向前移动一小段距离,并伴有滑梯。((b)在爬行机器人的运动期间,实际的运动周期和红外热合器。图片来源:Yang,Y等,聚合物
研究
作者提出了一个模块,该模块结合了超螺旋聚合物人造肌肉弦。所提出的模块具有本体感受的感应能力,并具有驱动感应函数。双向驱动能力使该模块能够沿两个相反的方向弯曲。使用内部软应变传感器来推断机器人的弯曲变形。
在研究中构建了原型软机器人,该研究结合了2层超螺旋聚合物人造肌肉弦。该团队使用该模块作为基本单位建造了一个机器人抓手和一个爬行者,并根据对表现的观察,作者设想了其他机器人,例如水母风格的游泳者。
根据任务需求,研究中提出的设备可用于感应或致动作用。可以自适应地更改此功能以达到所需的结果,从而使其成为动态模块。
该爬虫的灵感来自英寸虫子和棘手的植物,一端的棘手结构提供了必要的各向异性摩擦机制以允许运动。在研究中评估了该机器人的运动率和效率。在各种对象上评估了抓手,以评估其感应和抓握功能。在不同的物体上使用抓紧器产生了明显的电阻时间曲线。
未来的研究
基于本研究中观察到的有希望的结果,作者提出了进一步的工作,以评估结合了超螺旋聚合物人造肌肉模块的软机器人的性能和现实应用。利用拟议模块的更多软机器人将由作者在未来的研究中开发。
作者将来将介绍的一个提议的研究领域是向抓手添加可变的刚度功能,以使其能够掌握更广泛的对象。此外,未来的研究将融合模块中的可调刚度并增加模块的输出力。理论建模将用于研究执行器与软机器人体之间的相互作用。
进一步阅读
Yang,Y等。(2022)基于超螺旋聚合物人造肌肉弦的本体感受软机器人模块聚合物14(11)2265 [在线] mdpi.com。可用网址:https://www.mdpi.com/2073-4360/14/11/2265
免责声明:此处表达的观点是以其私人身份表达的作者的观点,不一定代表AZOM.com的观点有限的T/A Azonetwork本网站的所有者和运营商。此免责声明构成了条款和条件使用此网站。