2022年4月8日综述了阿历克斯史密斯
在新加坡大学的技术和设计(SUTD)方法采用自由液体3 d打印(FL-3DP)技术开发3 d打印更强烈和软机器人几何复杂的组件。
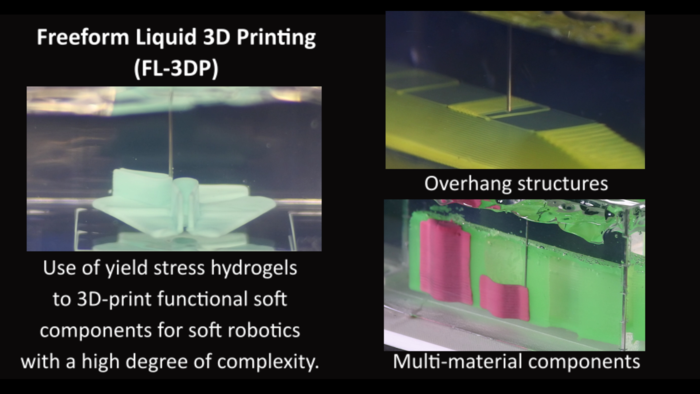 屈服应力水凝胶使用3 d打印功能软组件软机器人与高度的复杂性。图片来源:新加坡大学的技术和设计。
屈服应力水凝胶使用3 d打印功能软组件软机器人与高度的复杂性。图片来源:新加坡大学的技术和设计。
FL-3DP崭露头角的技术表现出高多材料的潜在支持3 d打印功能组件。它利用凝胶暂停媒体墨水的喷射并且举行到位。当油墨固化,那么容易凝胶可以用水洗掉。
这个方法克服了两个很大的局限性有经验在目前的3 d打印技术。首先,它允许3 d打印的材料需要很长时间巩固而被挤压。亚博网站下载
其次,由于其潜在的油墨和保留在液体状态,先进的几何图形像悬臂结构形状与高纵横比,或好多种材料的组合,已经成为一个可能的选择。亚博网站下载
但早期FL-3DP确认只有有限的特性而制作复杂的组件mono-material结构或简单的形状像贝壳和网格可以说明。
缺乏更复杂的示威者,尽管这项技术的承诺可能是部分所描述的问题与调节油墨之间的接口和支持,从而要求打印分辨率。
SUTD的科学家设法更好地预测丝的形状,导致增强的打印分辨率和保真度对流变特性的深入研究和界面稳定性之间支持凝胶和油墨。
这个结果允许FL-3DP的完整开发技术,通过制造复杂的elastomeric-based组件集成多个材料和改进范围的几何图案。亚博网站下载
这项研究已经被报道ACS应用材料&接口亚博网站下载日报》。
复杂的气动元件软机器人应用程序通常用于软触手被研究人员开发和制造。这样做是为了说明的好处FL-3DP传统制造方法,如模具和铸件。
通过集成的软、硬和功能弹性体,研究人员能够准确地控制组件的形状变形,优化其功能修复软爪的摩擦表面或通过提供感知能力,并提高组件的寿命比常规铸造同行的十倍。
这些结果是全球努力的一部分,标志着一个新时代的extrusion-based 3 d印刷媒体的帮助下合适的悬挂。同时,这种改进方法为设计师和工程师提供了一个更广泛的设计空间和可能利润几个应用程序。
这包括软机器人强大和复杂的组合一个广泛范围的材料和功能是必要的。亚博网站下载
目前,团队正致力于扩大的范围可加工的材料提出一个新的悬挂媒体似乎化学兼容更多的油墨。亚博网站下载
FL-3DP和其他新extrusion-based加法制造过程是让我们越来越接近完整的终极目标直接co-fabrication复杂功能的系统,如机器人和其他复杂功能的产品和设备。
巴勃罗Valdivia,研究首席研究员和助理教授,新加坡大学的技术和设计
期刊引用:
加莱,T。等。(2022)自由液体软功能组件的3 d打印柔软的机器人。ACS应用材料界面亚博网站下载。doi.org/10.1021/acsami.1c20209。
来源:https://www.sutd.edu.sg/