工程师根据欧盟资助项目脉冲星,公布了一个全自动的机器展示,可以构建轨道望远镜的主镜从独立的部分。系统,包括组件由CSEM铺平了道路的装配直接在空间——巨型望远镜天文望远镜,否则太大在一块发射进入轨道。更重要的是,自治系统有潜力在未来构建其他大空间结构,如轨道太阳能电池板或太阳帆。
太空望远镜给科学家前所未有的了解宇宙是如何工作的。著名的哈勃望远镜导致天文学取得重大突破,并希望现在高为其继任者詹姆斯韦伯太空望远镜(JWST)。2021年12月25日启动卫星飞往目的地(距离地球150万公里),2022年1月24日,应该达到这一点。
然而,潜在的进一步发现的物理限制:望远镜的大小。进一步探索更深,进入太空,望远镜必须长到史诗般的大小。考虑到航天器的有效载荷能力有限,导致这样的庞然大物进入太空提供了一个真正的挑战。
解决这个问题目前正在研究包括发送太空望远镜在单独的组件。这些组件可以由自主机器人一旦仪器在轨道上。
这种方法已经在欧盟资助项目研究脉冲星,这代表一个超大型的原型结构组装机器人。这个项目的目标是开发自主技术砖需要组装大型结构空间。
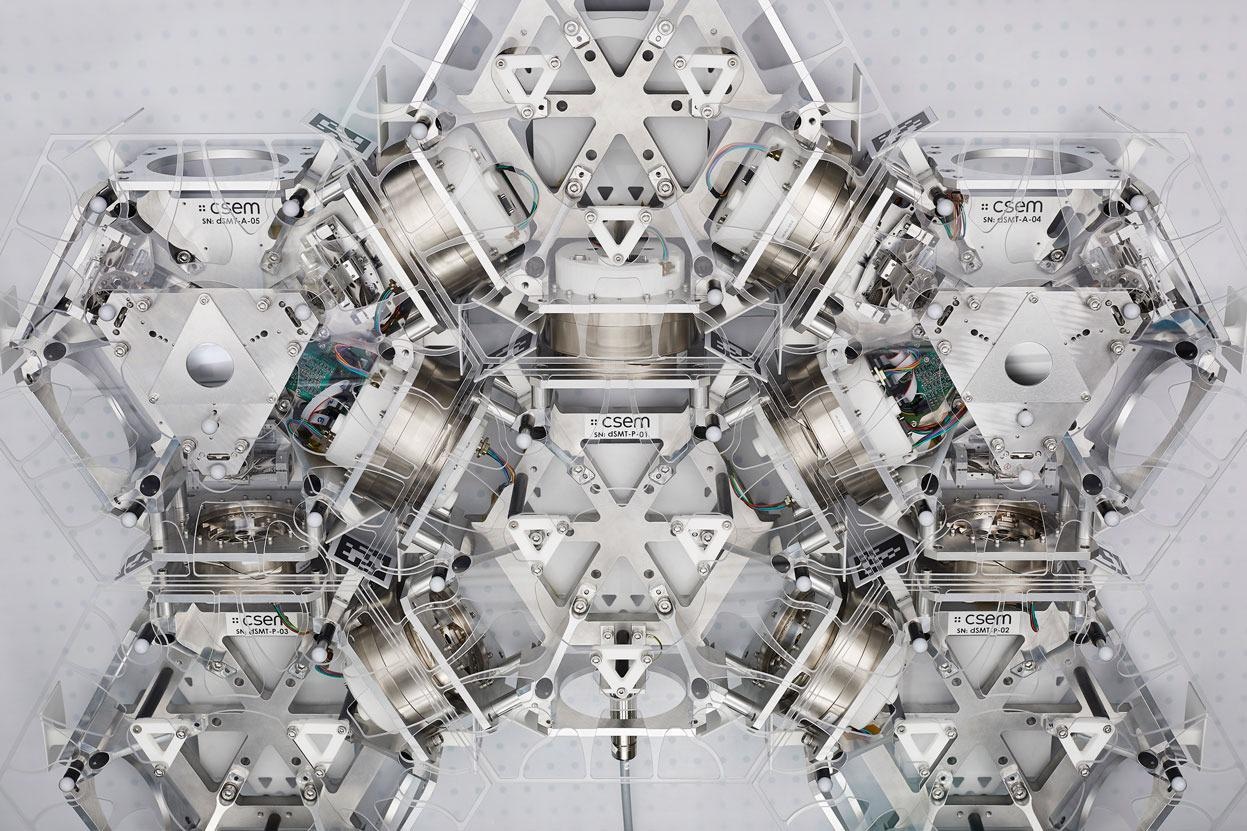
脉冲星是法国公司Magellium为首,包括七个其他欧洲组织,包括CSEM。项目团队刚刚公布了三个示威者,其中一个是高精度自主机器人系统,该系统将用于组装望远镜的主镜。这个演示可以构建一个1:3比例的镜子(300 mm x 180 mm)组成的六个瓷砖重11公斤。在演示中,每个瓷砖覆盖着透明板,但在现实的情况下,他们将配备一个镜子。
”在未来,我们将能够组装一次镜直径与更多的瓷砖,”朱利安Rouvinet说,CSEM高级工程师。”但对我们来说没有多大意义的构建一个如此规模的示威者,因为这种结构的重量将是地球上的一个主要问题——当然在轨道上这个结构的重量不会成为一个问题。”
三脚允许精确调整
示威者包括六个组件连接到一起的一个机械手臂和运作。CSEM专门设计的六块,包括两个三脚使他们能够调整他们的位置1微米的精度(即。,五十分之一的人类头发的宽度)和重复性优于5微米。
三脚可以达到这样的精度由于使用3 d打印灵活的关节,第一次在这样的空间应用程序。”3 d打印的关节防止系统的组件相互摩擦,穿出去,不再需要润滑剂,”Rouvinet说。”这意味着系统可以运行时间和提高精度。“用于控制和校准的软件系统也由CSEM开发的工程师。
更广泛的应用
完成示威者,脉冲星项目结束,但在这一领域的研究才刚刚开始。“望远镜并不是唯一的大型结构,总有一天需要聚集在空间,“Rouvinet说。”,这个机器人系统可以用于其他用途,如修复卫星、空间站,加油组装太阳能电池板甚至构建任务的巨大热盾登陆火星。”
现在,所有的科学的眼睛是詹姆斯韦伯太空望远镜,已经遇到了可以带进空间的物理限制与当前的技术。脉冲星,然而,不是一个人在试图打破这个物理技术障碍。”美国航空航天局的工程师们正在开发一种折叠望远镜能够适应大型负载航天器最终,SpaceX公司打算推出说,“安东尼Ummel CSEM项目经理。”研究成果无疑将加大一旦我们收到第一个詹姆斯·韦伯的照片。”
视频来源:CSEM





