在波兰的一个研究小组开发了一种新型节能仿生无人水下航行器推进系统设计(BUUV)。发表在《能量,团队研究创新的推进系统设计细节。
研究:创新节能推进系统低速仿生水下机器人。图片来源:温贝托拉米雷斯/ Shutterstock.com
设计师和工程师一直欣赏大自然的形式及其采用的新方法解决问题的能力和与周围的环境无缝集成在一起。自然有一个看似无穷无尽的生产能力都是创新和高性能的系统。
在开发新技术系统设计师和工程师已经适应了生产创新的高性能的生物仿生概念模型、工具和结构基础上的自然世界。
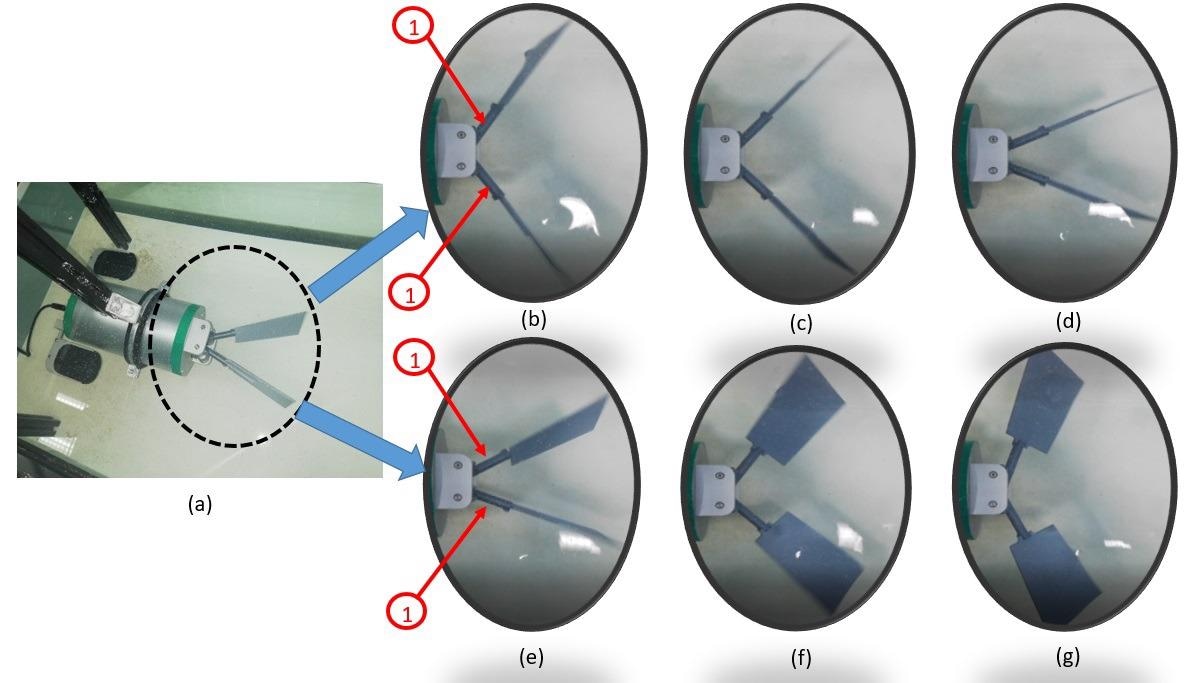
一个BUUV(一)后续阶段的运动:(罪犯)动力冲程,(eg)回击;附加的关节。图片来源:Piskur P et al .,能量
UUV, BUUV
无人潜水器(UUVs),也被称为水下无人机,潜水工具,可以通过各种水系统导航有或没有人工干预。通常,UUVs分为两类,遥控潜水器,或智能水下机器人。
螺旋式等传统水下推进系统轴向推进器,扭矩转化为推力;换句话说,从一个引擎将螺旋桨和生成武力水流向下的移动和叶片。
然而,仿生系统变换UUVs BUUVs吸引大量关注他们展示更高的推进效率,增强可操作性,和安静比传统UUVs装有轴向驱动螺旋桨。
仿生系统可能设计的像一条鱼,海龟,海豹或其他海洋动物波形生成推进通过把水推对波。然而,尾部振动的影响在船体周围的流体流动可能会导致涡流,因此需要研究FSI和涡结构。
此外,现有BUUV设计往往有许多运动部件刚性和灵活的形式,导致一个复杂结构不是没有缺陷:“这种类型的建筑是很难控制,昂贵,增加洪水里面的电子元件的风险,”博士解释道PawełPiskur机电工程学院,波兰海军学院,格丁尼亚,波兰。
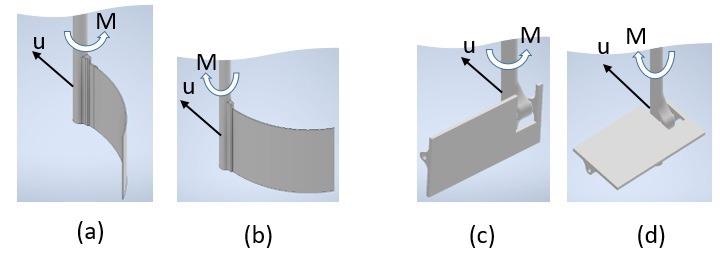
两种类型的推进系统用于测试:柔性鳍在逆时针(一个)顺时针,(b)运动;额外的鳍联合力量(c)并返回(d)中风。图片来源:Piskur P et al .,能量
创新推进系统
小说仿生推进系统研究人员设计了包含两个鳍安装用更少的运动部件和组件驱动机制比现有的模型。向外”两个鳍的运动只是一个辅助运动,允许指定的值的最大角偏转翼关于纵向对称轴,开始工作所需的运动,Piskur说。
由驱动鳍鳍工作,推动水涌出反对BUUV的主体,然后返回到起始位置降低力产生的位置转变:“在鳍运动,改变他们的立场从垂直于水平面。这减少了鳍的水动力拖在外面运动,因此,水下车辆的阻力。”Piskur解释道。
这个系统的目的是为了解决一些相关的挑战与现在的仿生模型通过减少设计和控制变量的数量来演示一个创新的推进系统的区别和一个起伏的系统。
“增加在推力鳍的速度一代而减少的速度鳍运动应该返回的结果中更好的效率,”Piskur说。
推进系统表现出更高的推力能力和净效率改善低速运动,从而确保了仿生运动的性质。球队状态,还要进行进一步的试验来评估的影响身体的小说推进系统设计以及将一个额外的关节和鳍的灵活性,可以适应各种风格的运动。
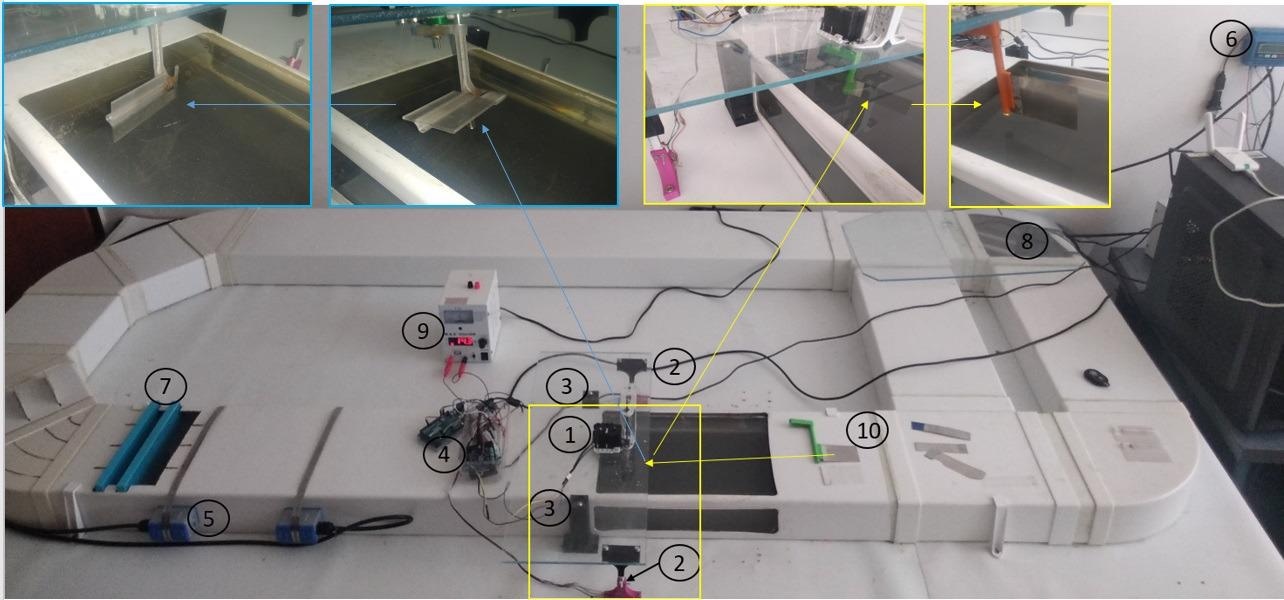
实验室水隧道:1-servomechanism Dynamixel MX-12W, 2-strain指标,3分轴承、4-micro-controller单元(MCU)和应变仪放大器,5-ultrasonic流传感器、6-ultrasonic流动单元,7-water方向盘,8-external水泵、9-power供应,和十条鳍。图片来源:Piskur, P et al .,能量
团队希望本研究的有前景的结果转移到新的和升级模型基于相同的系统,帮助创建BUUVs准确复制动作和高能源效率的生活海洋生物。团队已经申请了一个专利的设计,目前正在进行中。
先进机器人包括UUVs和BUUVs开放可能性探索水下的海洋环境与海洋可以帮助监测、海底测绘、管道检查,和许多更多。
引用
Piskur p;Szymak p;Przybylski m;nautica k;Jaskolski k;Żokowski, m .创新节能推进系统低速仿生水下机器人。能量2021年,14,8418年。https://www.mdpi.com/1996-1073/14/24/8418
免责声明:这里的观点是作者表达他们的私人能力,不一定代表AZoM.com T /有限的观点AZoNetwork这个网站的所有者和经营者。这个声明的一部分条款和条件本网站的使用。