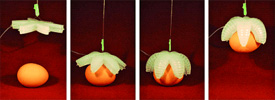
它看起来像是软塑料制成的海星。当空气通过一根细管吹入海星体内时,海星就活了,它就像一只手一样合上了。它这样做非常温和,它可以抓住一个生鸡蛋而不打破它。
这个海星状的抓取器是由软塑料制成的气动软机械臂的原型,该模型已经在杂志上介绍过《应用化学》由哈佛大学(美国波士顿)的乔治·M·怀特塞兹和他的团队撰写。
无论是用于机器生产还是现代外科手术,在爆炸装置或无人飞船的停用方面,机器人在许多领域都变得不可或缺。然而,对于传统的硬机械臂来说,操纵水果或内脏等精细物体仍然是一项困难的任务。使用软机器人组件可能会更容易。
怀特赛兹和他的同事们想用一种基于气动网络(PneuNets)的新方法来实现这一想法:他们将通道嵌入弹性塑料中,称为弹性体。为了推动运动,管道就像气球一样膨胀。这导致通道扩展到弹性体中最易屈服的区域。在均质弹性体中,这些是壁最薄的区域;如果有不同的材料,它们是由更柔软、更有弹性的材亚博网站下载料制成的墙壁区域。为了给相邻的膨胀通道腾出空间,整个组件弯曲,使更严重拉伸的墙壁在外面。为了制造出能够进行复杂运动的原型,研究人员将一系列这样的部件组合在一起。
零部件的变形方式取决于设计和使用的材质。怀特塞兹和他的同事将两种不同的硬硅弹性体制成的部件连接起来,对运动进行编程。因此,亚博网站下载他们能够制造出海星般的抓鱼器。将这些装置充气会使它们卷曲在物体周围,像手上的手指一样抓住物体。他们的触感如此柔软,甚至可以委托给他们一个生鸡蛋或一只活老鼠。与硬机械臂相比,不需要使用传感器进行复杂的精确调谐控制。