市场上唯一的自治区域共焦表面光度仪年代集市2。它是光学领域的一个突破,因为它强大的功能和紧凑的设计。
从来没有安装Sensofar系统这么简单;年代集市2只需要两个单独的连接,一个以太网电缆和电源。

图片来源:Sensofar计量
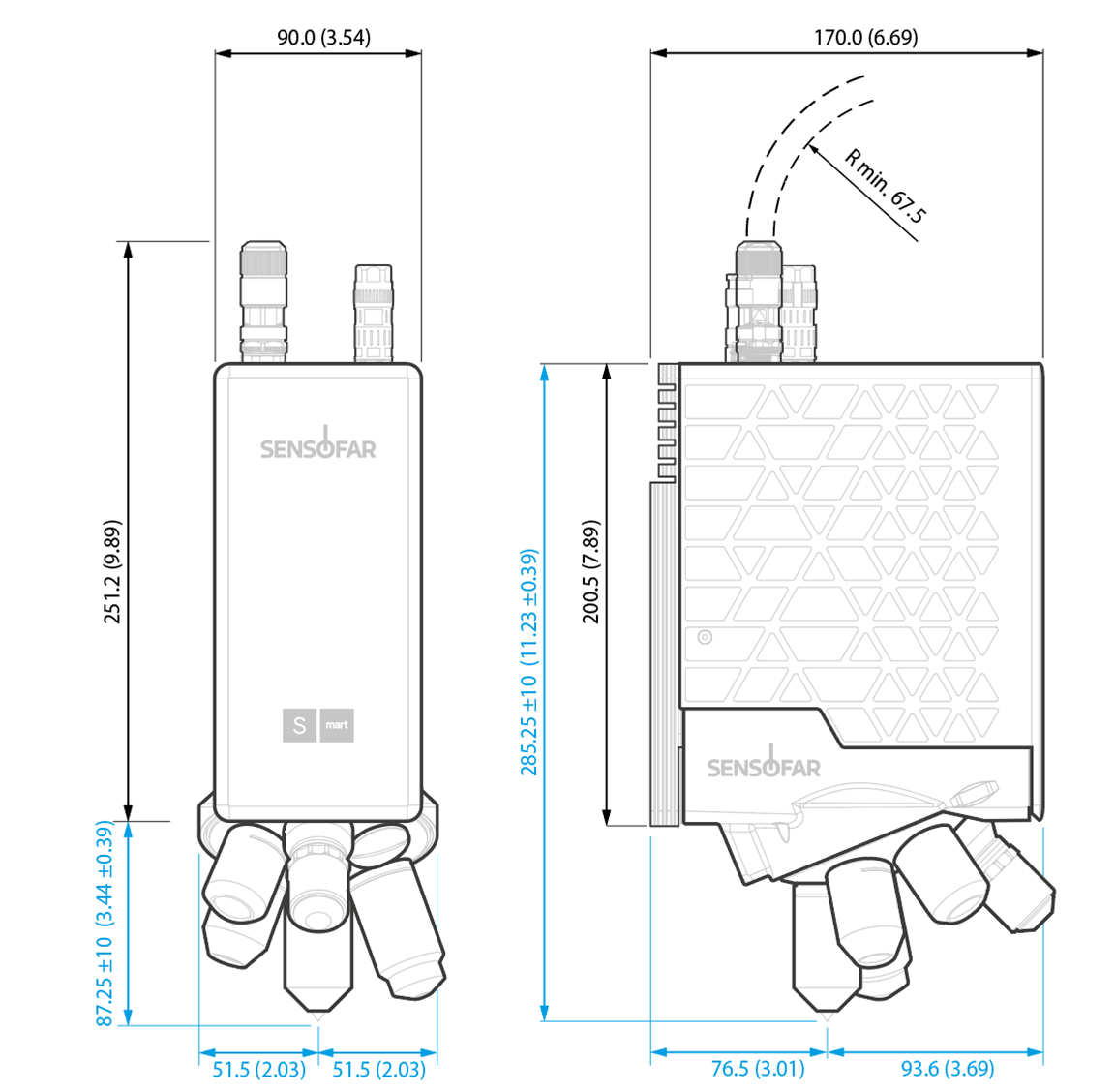
由于其小的宽度(90毫米),可积的头可以安装在不妨碍用户或生产过程。

图片来源:Sensofar计量
S集市2所有的电子产品,包括计算能力,在头部和创建非常简单的集成。
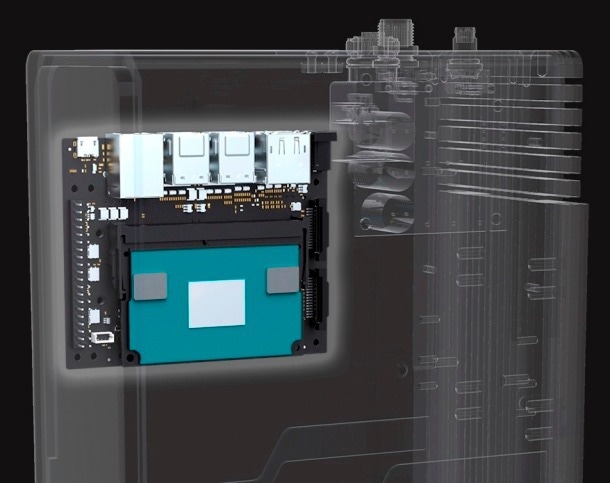
图片来源:Sensofar计量
正确的计量工具操作,温度是至关重要的。一个高度有效的被动冷却系统是保持系统运行的解决方案。
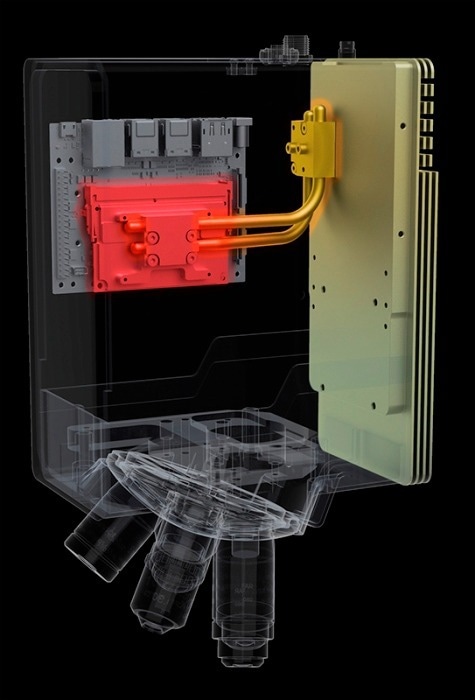
图片来源:Sensofar计量
点或线共焦色彩学相比,图像面积S集市2区域共焦能力,所以横向分辨率和X和Y是相同的。
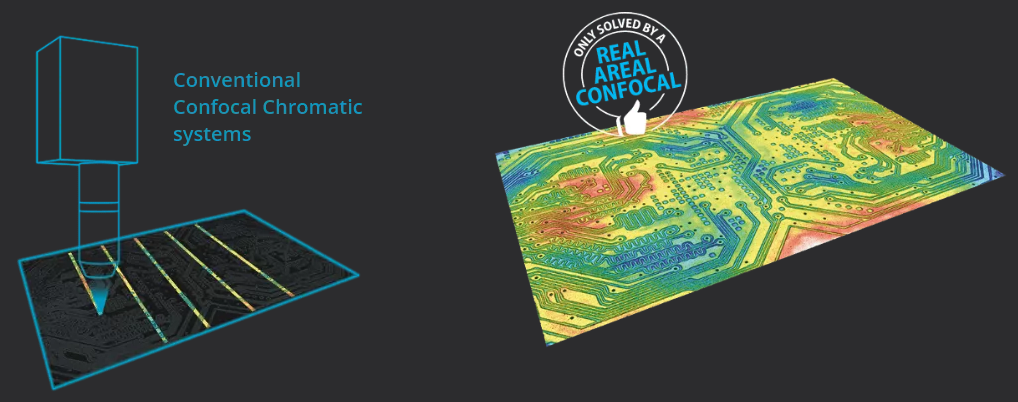
图片来源:Sensofar计量
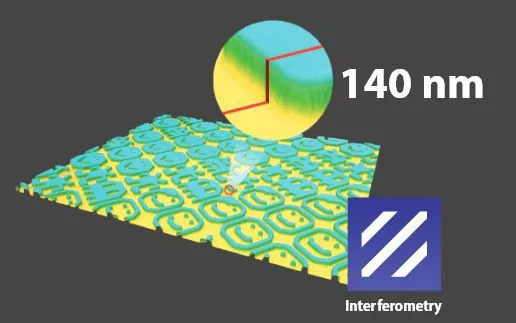
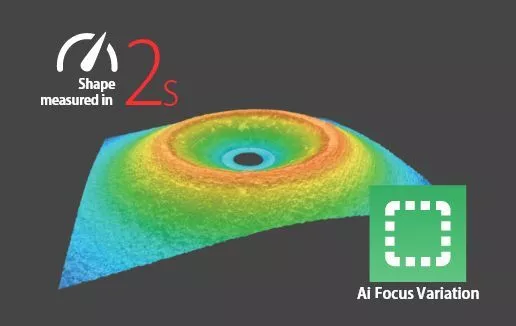
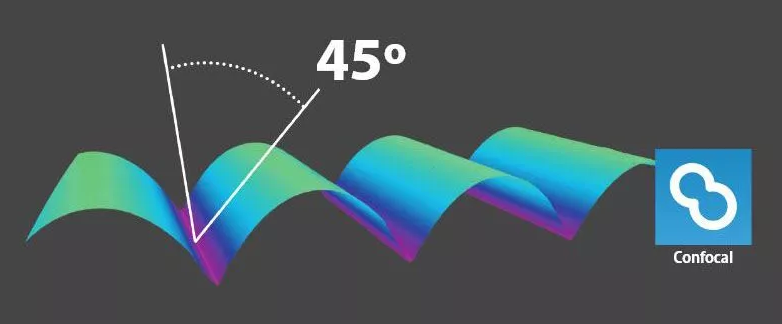
S集市2包括三个技术测量相同的头,包括人工智能焦点变化,共焦,和干涉扫描与最合适的技术。
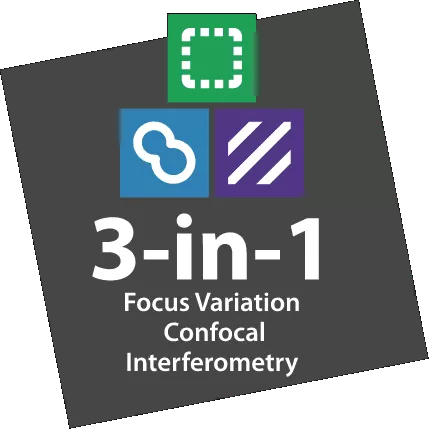
图片来源:Sensofar计量
图片来源:Sensofar计量
图片来源:Sensofar计量
图片来源:Sensofar计量
仅仅专注于表面,和S集市传感器将处理其余的。创建了这些传感器的产品组合满足自动化的需要,通常出现在生产线。

图片来源:Sensofar计量
图片来源:Sensofar计量
传感器定位的重点,优化光和Z范围,用户收到结果后点击。
图片来源:Sensofar计量
系统规范
表1。客观的镜头——Brightfield。来源:Sensofar计量
| 玛格 |
5倍 |
10倍 |
20 x |
50 x |
| NA |
0.15 |
0.30 |
0.45 |
0.80 |
| WD(毫米) |
23.5 |
17.5 |
4.5 |
1.0 |
| 视场1(µm) |
2820 x 2820 |
1410 x 1410 |
700 x 700 |
280 x 280 |
| 空间抽样2(µm) |
2.76 |
1.38 |
0.69 |
0.27 |
| 光学分辨率3(µm) |
1.11 |
0.55 |
0.37 |
0.21 |
| 测量噪声4(nm) |
90年 |
35 |
10 |
4 |
| 最大坡度5(º) |
9 |
17 |
27 |
53 |
1最大的视野与2/3”相机和0.25 x光学。
2像素大小。
3l s:线和空间,根据瑞利判据衍射极限的一半。值的蓝色LED brightfield目标。
4测量噪声测量的区别两个连续测量校准镜放置垂直于光轴。在VC-E振动环境中获得的值。
5光滑的表面。对粗糙表面86°。其他目标是可用的。
表2。客观的镜头——干涉法。源计量
| 玛格 |
10倍 |
20 x |
50 x |
| NA |
0.30 |
0.40 |
0.55 |
| WD(毫米) |
7.4 |
4.7 |
3.4 |
| 视场1(µm) |
1410 x 1410 |
700 x 700 |
280 x 280 |
| 空间抽样2(µm) |
1.38 |
0.69 |
0.27 |
| 光学分辨率3(µm) |
1.38 |
0.69 |
0.30 |
| 系统噪声4(nm) |
< 5 |
| 最大坡度5(º) |
17 |
24 |
33 |
1最大的视野与2/3”相机和0.25 x光学。
2像素大小。
3l s:线和空间,根据瑞利判据衍射极限的一半。空间抽样可能会限制光学分辨率干涉的目标。值白光LED在干涉的目标。
4测量噪声测量的区别两个连续测量校准镜放置垂直于光轴。在VC-E振动环境中获得的值。
5光滑的表面。
表3。Z的性能。来源:Sensofar计量
| Z |
线性阶段 |
| 垂直距离 |
20毫米(0.79”) |
| 决议 |
5海里 |
S集市2,新的可积区域从Sensofar共焦头