静态特性和动态响应的观察对MEMS器件的测试和设计至关重要。它们是确定计算,建立串扰效应和量化表面变形的必要条件。
MSA-600-X/U微系统分析仪为微声学和微结构器件的超高频振动分析提供了独特的解决方案。
激光多普勒振动计提供高性能,并提供快速和实时响应测量与sub-pm位移分辨率。
内置频闪视频显微镜允许流线型的表征和平面内运动的实时动画。可选的白光干涉仪在几秒钟内提供了大量的3D表面数据。MSA-600分析仪以其直观的用户界面和简单的操作为补充,是MEMS研究和开发和质量检查中的一个强大的光学测量解决方案。
突出了
-
一体机光学测量工作站
-
无与伦比的子下午移位分辨率
-
没有高达2.5 GHz后处理的实时响应测量
-
快速测量和可视化挠度形状
-
操作直观简单
-
自动化系统,便于并入探测站
技术数据
表1。来源:Polytec.
| MSA-600-X / U系统配置 |
| 基本配置 |
面外振动测量高达300 MHz / 600 MHz |
| 选项 |
| 带宽扩展(BWX)1 |
面外振动测量高达1300 MHz / 2500 MHz |
| 微分测量 |
差出平面测量 |
| 平面运动分析2 |
In-plane-motion分析 |
| 地形测量 |
地形测量 |
1适用于MSA-600-U模型
2适用于MSA-600-X的型号
表2。来源:Polytec.
| 计量规范 |
| 出平面测量 |
激光多普勒vibrometry |
| 配置 |
MSA-600-X |
MSA-600-U |
BWX1 |
BWX2 |
|
| 分钟的频率 |
6.25赫兹 |
6.25赫兹 |
200兆赫 |
1300 MHz. |
|
| Max。频率 |
300 MHz. |
600兆赫 |
1300 MHz. |
2500兆赫 |
|
| 最好的频率分辨率 |
| 高达200 MHz |
6.25赫兹 |
6.25赫兹 |
- |
- |
|
| 500 MHz. |
15.625赫兹 |
15.625赫兹 |
- |
- |
|
| 600兆赫 |
- |
31.25赫兹 |
- |
- |
|
| 1300 MHz. |
- |
- |
62.5 Hz. |
- |
|
| 2500兆赫 |
- |
- |
- |
125 Hz. |
|
| 时域测量 |
| Max。采样时间 |
160毫秒 |
160毫秒 |
- |
- |
|
| 最大对象速度 |
| 高达300mhz |
≥150米/秒 |
≥150米/秒 |
13 ~ 19 m / s1 2 |
- |
|
| 300 ... 600 MHz |
- |
80 ... 150 m / s1 |
19…38米/秒1 2 |
- |
|
| 600…1300 MHz |
- |
- |
38…80 m / s1 2 |
- |
|
| 1300…2500 MHz |
- |
- |
- |
80 ... 150 m / s1 2 |
|
| 位移分辨率3 4 |
| 高达1兆赫 |
100 fm /√赫兹 |
100 fm /√赫兹 |
- |
- |
|
| 1 MHz ... F MAX5. |
7.5 fm /√赫兹 |
7.5 fm /√赫兹 |
12.5 fm /√赫兹 |
12.5 fm /√赫兹 |
|
| 1 MHz ... F MAX6. |
15 FM /√Hz |
15 FM /√Hz |
25 FM /√Hz |
25 FM /√Hz |
|
| 1 MHz ... F MAX7. |
30 fm /√赫兹 |
30 fm /√赫兹 |
50 fm /√赫兹 |
50 fm /√赫兹 |
|
1频率概念
2最大位移幅度≤10 nm
3.噪声限制分辨率定义为在信噪比为0 dB和频谱分辨率为1 Hz时的信号幅度(rms)。
4.可达到的分辨率是频率依赖性的。指定的值是给定带宽上的平均值。
5.MSA-600-X/-U无MSA-A-DIF选项
6.具有MSA-A-DIF选项,无差分测量模式
7.使用MSA-A-DIF选项,差分测量模式
表3。来源:Polytec.
| 平面测量 |
频闪观测视频显微镜 |
| 配置 |
MSA-600-X平面运动分析选项 |
| 频率范围 |
2.5 MHz |
| Max。速度 |
> 0.1 m / s ... 10 m / s(倍率依赖) |
| 客观放大2 |
1x ... 100x. |
| 位移幅度分辨率3. |
5海里 |
| 时间分辨率 |
100 ns(频闪曝光时间);max。频闪抖动±40 ns |
| 系统输出 |
位移数据、伯德图、阶跃响应图、衰减图、轨迹图 |
1在相应范围的最大带宽Fmax上执行平均。
2客观规范,详见下表。
3.振动隔离台为512射线频率噪声底板。
表4。来源:Polytec.
| 地形测量 |
白光干涉法 |
| 配置 |
MSA-600带有地形测量选项 |
| 垂直测量范围 |
250μm |
| 的评价方法 |
光滑的表面1 |
粗糙表面2 |
| Z表现: |
| 测量噪声3. |
0.09纳米 |
6纳米 |
| 垂直分辨率4. |
<1nm. |
< 37海里 |
| 平整度测量: |
| 平均平面度偏差5. |
4.5 nm. |
45 nm制程 |
| 可重复性6. |
0.25纳米 |
14海里 |
| 步骤高度测量一个校准的深度设置标准2 7 |
| 标称步长 |
0.24μm |
0.75μm |
7.5μm |
75μm |
| 可重复性8. |
0.02μm |
0.04微米 |
0.05μm. |
0.06μm. |
| 最大偏差9. |
0.05μm. |
0.12μm |
0.16μm |
0.18μm |
1相关图相位分析,可用于平面上。
2相关图包络分析,用于非稳定/粗糙表面
3.在通过25个单次测量下,在可重复条件下计算出平均测量的信号幅度的rms值,用于平行对准平面镜(R≈4%,λ/ 20)。
4.测量噪声(N = 1)·√8
5.在可重复条件下,测量平坦度值(根据ISO 1101)的测量平面值(根据ISO 1101)的平行对准平面镜(R≈4%,λ/ 20)。
6.在平行排列的平面镜上测量50次平度值的标准偏差(根据ISO 1101)
(R≈4% λ/20)。
7.在KNT 4080/30型(ISO 5436-1)的校准深度设置标准上,每步测量15次
8.可重复性条件下标定步长测量偏差的标准偏差。
9.在重现性条件下,每步15次测量中与校准步高相关的最大测量偏差。
表5所示。来源:Polytec.
| 光学规格 |
| msa - i - 620传感器头 |
| 激光波长 |
532海里 |
| 激光安全类 |
3R级(< 5mw可见输出) |
| 光源波长 |
470海里 |
| 光源安全等级 |
2级LED产品(<20 MW可见输出) |
| 相机 |
全场渐进扫描摄像机 |
| 相机的分辨率 |
1732 x 1200像素 |
表6所示。来源:Polytec.
明视野
目标 |
放大 |
工作距离
(WD)毫米 |
斑点直径
(1 /E²)μm |
的视野
毫米x毫米 |
| A-MOB-001x |
1 |
13 |
46 |
10.0 x 7.0 |
| A-Mob-002x |
2 |
34 |
23 |
5.1 x 3.5 |
| A-MOB-005x |
5. |
34 |
9.3 |
2.0 x 1.4 |
| 一个暴徒- 010 x |
10 |
33.5 |
4.6 |
1.0 x 0.7 |
| 一个暴徒- 010 b - ld |
10 |
48.9 |
4.6 |
1.0 x 0.7 |
| A-MOB-020x |
20. |
20. |
2.3 |
0.51 x 0.35 |
| 一个暴徒- 050 x |
50 |
13 |
1.4 |
0.20 x 0.14 |
| A-Mob-100x |
One hundred. |
6. |
0.8 |
0.10 x 0.07 |
表7所示。来源:Polytec.
干扰
目标 |
放大 |
工作距离
(WD)毫米 |
类型 |
的视野
毫米x毫米 |
| A-IOB-02X5-B |
2.5 |
10.3 |
迈克尔森 |
4.0 x 2.8 |
| 伯- 005 x - b |
5. |
9.3 |
2.0 x 1.4 |
| a-iob-010x-b |
10 |
7.4 |
Mirau. |
1.0 x 0.7 |
| 伯- 020 x - b |
20. |
4.7 |
0.51 x 0.35 |
| 伯- 050 x - b |
50 |
3.4 |
0.20 x 0.14 |
| 伯- 100 x - b |
One hundred. |
2 |
0.10 x 0.07 |
表8所示。来源:Polytec.
| 通用规范 |
| 成分 |
msa - i - 620
传感器头 |
MSA-F-620
前端 |
msa - w - 620的数据
管理
系统 |
msa - e - 600
控制器 |
| 力量 |
通过msa - f - 600
前端 |
100…240 vac
±10%,50/60 Hz
max。100年弗吉尼亚州 |
100年…240年休假
±10%,50/60 Hz
max。525年弗吉尼亚州 |
100年…240年休假
±10%,50/60 Hz
max。450 VA. |
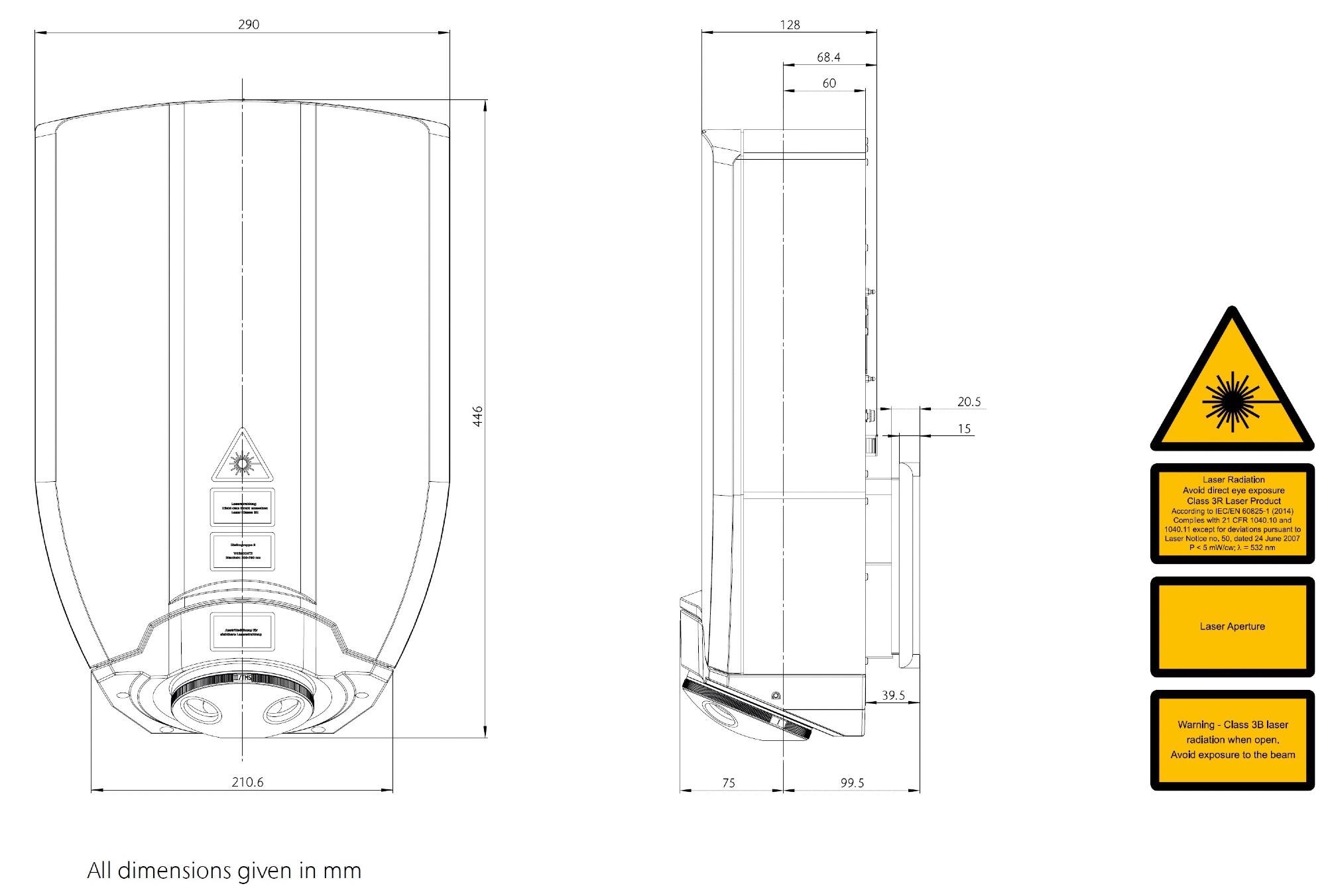
方面
[w x l x h] |
参见图 |
485 x 150 x 380毫米
(19英寸,84 TE / 3 HE) |
尺寸:485 x 190 x 550 mm
(19", 84 te /4 he) |
外形尺寸:499 x 177 x 373 mm
(19英寸,98 TE / 4 HE) |
| 重量 |
12.6千克 |
9.0千克 |
18.0千克 |
12.0公斤 |
操作
温度 |
18 ... 30°C
(64.4……86°F) |
+ 5 ... + 40°C(41 ... 104°F) |
贮存
温度 |
-10年……+ 65°C
(14…149°F) |
-10年……+ 65°c(14…149°F) |
| 相对湿度 |
max。80%,不结露 |
表9所示。来源:Polytec.
| 遵守标准 |
| 电气安全 |
IEC / EN 61010-1 |
| emc. |
IEC / EN 61326-1排放:限制A类,
IEC/EN 61000-3-2和61000-3-3
免疫:IEC / EN 61000-4-2至61000-4-6和IEC / EN 61000-4-11 |
| 激光安全 |
Iec / en 60825-1 (cfr 1040.10, cfr 1040.11) |
扩大不确定性
测量 |
SEMI MS4-0416和MS2-113 |
软件功能
表10。来源:Polytec.
| 出平面测量 |
| 数据采集 |
| 视频显示 |
直接将测试对象的现场、全场、黑白视频图像整合到用户界面中,进行交互式扫描设置和波束定位。数字放大成实时视频图像。 |
| 激光定位 |
可见激光移动与光标在直播视频图像上点击或拖动鼠标。 |
| 定义扫描几何形状 |
使用APS专业模式最多512 x 512点,每个对象的任何形状。使用鼠标在实时视频图像上以图形方式定义测量点。用户可以使用极、笛卡儿或六边形网格绘制单个对象,或定义单个点。定义单点(可选):单点几何可以通过细化或粗化网格来优化。自动生成连接扫描点的表面元素。 |
| 扫描几何导入 |
从UFF或ME范围格式导入几何图形。 |
| 自动对焦选项 |
激光在试样当前位置或扫描过程中自动聚焦;允许在每个扫描位置优化信号水平1。 |
样本
定位 |
通过使用精确定义的距离使用鼠标和绝对或相对位移来交互式X-Y定位阶段(可选)。可以单独获取不同位置的测量并组合用于分析和呈现。 |
振动计
控制 |
所有的振动计参数,如速度范围和跟踪滤波器是软件控制的。 |
| 显示 |
同时显示实际激光光斑的实时视频,包括扫描点的整个扫描区域,以及各种信号(时间轨迹和光谱)的多个分析仪显示。 |
标本
激 |
广泛的波形包括正弦,周期啁啾,白噪声,随机信号,扫频和任意信号。 |
获得的扫描
数据 |
在所有扫描点处获得所有通道的整个频谱 |
| 快速扫描 |
快速采集模式(高达50点/秒)测量在单一频率。带宽是可确定的。复杂和幅度平均和信号增强是可用的。 |
时间域
数据(可选) |
时域采集,时域平均,时域动画。 |
| 门的输入 |
门输入间歇扫描控制。 |
| 扫描数据有效性检查 |
在信号增强(SE)模式下对所有扫描点进行数据质量检查。MSA-600检查每个频谱的数据质量。平均谱向信噪比最好的谱进行加权。测量点被标记为:最佳(仅SE),有效,或A/D过载。 |
| 触发 |
自动或手动阈值,上升或下降沿,来源:外部或任何测量信号 |
| 平均 |
光谱的复杂或幅度平均,峰值保持,时间 |
| FFT行 |
2343750;4,687,500与BWX 1/2选项 |
| 窗口函数 |
矩形,汉明,汉宁,平顶,布莱克曼·哈里斯,巴特利特,指数型 |
1需要门户网站静态。
表11所示。来源:Polytec.
| 数据处理与分析 |
| 数据组织 |
通过树式文件浏览器支持项目面向工作流程,用于测量,设置,宏,用户定义波形,幅度校正文件。基于上下文基于不同文件类型的操作。 |
| 显示 |
存储的视频图像(静态或动画)上的彩色/灰色、填充/未填充等高线和3-D地物图,所有扫描点上的平均光谱,每个点上的单个光谱,如波德图或奈奎斯特图、线剖面。动画视频图像,便于可视化的结果。数据按速度、加速度或位移进行缩放。对数线性轴/ |
| 数据传输 |
ASCII,通用文件格式(UFF), ME范围和PolyWave二进制数据接口(可选)。UFF和ME范围数据可以作为用户定义的数据集导入、分析和处理,并与实测数据相结合。 |
| 图形转移 |
图形格式AVI(动画),JPEG,BMP,TIFF,PNG,GIF。 |
| 数据处理 |
复杂光谱分析提供了面积和/或单点数据的以下数量和功能:幅度,幅度DB(A),相位,实部,虚,频率响应功能(FRF),H1,H2,自动功率,交叉功率,相干性,平均频率接平。第三倍频分析,ESD,PSD。 |
| Polytec信号处理器 |
PolyTEC信号处理器是PSV软件中包含的Polymath库的用户界面。易于使用的电子表格,用于后处理扫描数据。 |
| 自动化处理 |
软件可以完全自动化。 |
表12。来源:Polytec.
| 面内测量 |
| 数据采集 |
| 工作原理 |
在采集模式下,使用专有的测量算法对视频序列进行采样和分析。 |
| 闪光灯照明控制 |
控制频闪脉冲(间隔,脉冲长度)。 |
| 数据采集 |
采集频闪视频图像和物体运动的实时视图。 |
| 标本兴奋 |
集成信号发生器软件,具有正弦和脉冲信号的标本激励,具有励磁频率高达2.5 MHz。支持任意,用户提供的激励信号。 |
| 数据处理与分析 |
| 工作原理 |
运动分析是交互式的。运动数据基于图像相关,显示为X、Y位移值。亚像素分辨率可以实现纳米范围内的平面运动测量。 |
| 数据组织 |
支持面向项目的工作流,通过树形文件浏览器进行测量和设置。 |
| 实时视频显示 |
实时视频模式提供了测试对象运动的稳定,慢动作图像序列,以进行视觉表征。 |
| 显示 |
单个频率的位移和它们的微分,以及频谱,阶跃响应和衰减(下降)。
用于两水平和垂直运动的BODE图。
可以使用光标检查图形,缩放和PANSHED。对于每个图,可以选择不同的线和标记样式。 |
| 数据传输 |
图形可以导出为图像或ASCII文件,图像序列可以保存为AVI文件。 |
表13。来源:Polytec.
| 地形测量 |
| 数据采集 |
| 工作原理 |
通过对样品移动干涉物镜,可以生成高分辨率的X-Y-Z映射。干涉图样由摄像机捕获。 |
| 测量模式 |
短相干测量
扩展对比度范围的智能表面扫描技术 |
| 数据处理与分析 |
| 数据组织 |
支持面向项目的工作流,通过树形文件浏览器进行测量和设置。 |
| 后期处理 |
包络或相位评估 |
| 数据评估 |
线性回归;多项式拟合;减去;平均;滤波器,如中间,侵蚀,高通和低通滤波器;掩蔽功能 |
| 数据显示 |
表面视图:2D、3D显示和等值线视图,带有视频覆盖
配置文件视图:配置文件部分;相关形式;粗糙/波纹参数;图形/图表,几何数据,如角度,高度,半径等。 |
| 数据传输 |
图形可以以各种常用图像图形格式导出;测量数据可以作为ASCII文件导出。 |
| 自动化处理 |
软件可以完全自动化。 |
表14。来源:Polytec.
图片来源:Polytec
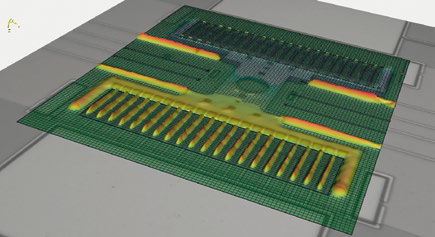
MEMS静电组合式综合分析
快速,实时响应测量的面外动力学的梳状驱动器显示所有的系统共振。所有的面内模都可以用超高灵敏度的激光多普勒振动仪检测,量化其微小的寄生面外贡献。
图片来源:Polytec
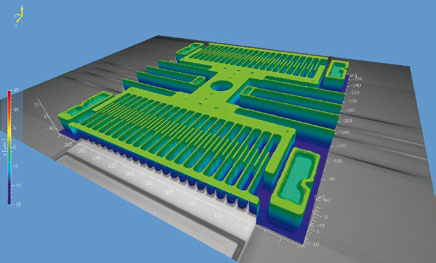
下图显示了梳状驱动器的主要平面内驱动模式的预兆图。通过实时模式动画可以观察设备的运行情况。

图片来源:Polytec
下面的高分辨率表面形貌测量显示了设备形貌的每个细节,甚至是在晶圆级的完全自动化测量。
图片来源:Polytec