本文用作原子力显微镜的设计和操作的基本介绍。 以下部分涵盖了帮助理解原子力显微镜的构造和操作的基本概念和技术。要完全理解原子力显微镜的工作原理,理解这些部分的内容是至关重要的。 维度和放大原子力显微镜最适合测量非常小的表面特征,因此熟悉被测量特征的尺寸是很重要的。原子力显微镜能够成像小到碳原子大到人的头发横截面的特征。一个碳原子的直径约为0.25纳米(nm),而一根头发的直径约为80微米(чm)。 在原子力显微镜中测量的常用尺寸单位是纳米。一纳米是一米的十亿分之一: 1米= 1,000,000,000纳米 1微米= 1000纳米 另一个常见的措施单位是埃斯特罗姆。一个纳米有十个埃(е): 1纳米= 10埃 原子力显微镜的放大倍数是指在计算机屏幕上观看的特征的实际大小与该特征的大小之比。因此,当一根头发的整个横截面在500毫米的电脑显示器(20英寸显示器)上观看时,放大率是: 放大倍数= 500毫米/。08毫米= 6,250 X 在超高分辨率成像的情况下,图像的整个视场可能是100纳米。在这种情况下,500mm电脑屏幕上的放大率为: 放大倍数= 500 mm /(100nm * 1 mm / 1,000,000 nm)= 5,000,000 x 压电陶瓷换能机械运动是由一个机电换能器产生的电能。用于洗衣机的电机是最常见的机电换能器类型。在原子力显微镜中最常用的机电换能器是压电陶瓷。 压电材料置于电场时,其几何形状会发生变化。运动的量和方向取决于压电材料的类型、材料的形状和场强。图1显示了压电圆盘在电势作用下的运动: 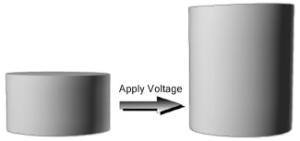
图1所示。当电压加到压电圆盘的上表面和下表面时,圆盘就会膨胀。 典型的压电材料将大约每伏施加1个纳米扩大通过。因此,为了得到更大的动作是很常见的使压电换能器具有数百个压电材料,在图2所示的层构成。亚博网站下载 
图2。将电压施加到该堆叠的压电盘的顶部和底部表面导致整个堆栈扩展。膨胀的量取决于所施加的电压,压电材料,和磁盘的数 通过使用压电材料的千层也能够获得运动一样大1000nm的每伏特。因此,具有100伏特,能够得到0.1毫米运动的与多层压电换能器。 力传感器原子力显微镜的构造需要力传感器来测量小探针和所成像表面之间的力。一种普通类型的力传感器利用悬臂和施加的力之间的关系。钩子法律的关系是: F = - K * d K是一个常数,取决于悬臂的材料和尺寸。D是悬臂的运动。一个由硅制成的悬臂,其尺寸为: L = 100微米 W = 20微米 t = 1微米 力常数K,大约是1牛顿/米。因此,如果悬臂移动1纳米,就需要1纳米牛顿的力。 用“轻杠杆”方法测量悬臂的运动是可能的。在光杠杆法中,光从悬臂梁的背面反射到光探测器。参见图3。 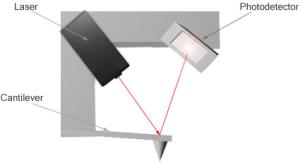
图3。光杆传感器使用激光束来监测悬臂的偏转。当悬臂上下移动,在光敏检测器的表面上的光束移动。 悬臂梁的运动与光电探测器的输出成正比。小到1纳米的运动通常是用原子力显微镜的“光杠杆”方法测量的。 反馈控制反馈控制通常用于将对象的运动保持在与另一个对象的固定关系中。当您走在人行道时,会发生反馈控制的简单示例。当您走在人行道上时,您可以通过观看人行道的边缘来不断控制动作。如果你开始走出人行道,你纠正你的运动,让你留在人行道上。反馈控制通常用于许多常见应用,例如自动控制飞机,并控制建筑物中的温度。在AFM中,反馈控制用于在测量扫描时与表面的“固定”关系保持探针。 原子力Microscope原子力显微镜的原理和操作类似于手写笔分析器。主要的区别在于,在原子力显微镜中,探针对表面的作用力要比手写分析器小得多。因为AFM中的力要小得多,所以可以使用更小的探针,分辨率也比手写分析器高得多。 AFM理论在AFM中,在探针和样品之间保持恒定的力,同时探头是扫描表面的光栅。通过监视探针的运动,因为它在表面扫描时,构造了表面的三维图像。 恒力是通过“轻杠杆”传感器测量力,并使用反馈控制电子电路来控制Z压电陶瓷的位置来保持的。见图4。 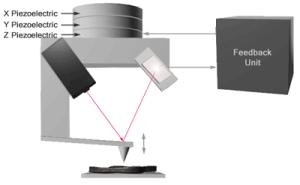
图4。该图说明了轻杆原子力显微镜的主要分量。X和Y的压电陶瓷被用于在表面上扫描探针。 探针在表面上的运动是由压电陶瓷产生的,压电陶瓷使探针和力传感器在X和Y方向上穿过表面。 AFM测量图5显示了原子力显微镜系统的所有组件和子系统。 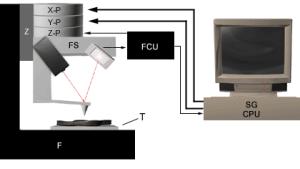
图5。原子力显微镜系统的组成部分和子系统。 (Z)粗糙Z运动翻译器-这个翻译器将AFM头移向表面,以便力传感器可以测量探针和样品之间的力。翻译器的运动通常为10毫米左右。 (T)粗X-Y平移台- XY平移台用于将AFM成像的样品切片直接放置在探针下方。 (X-P)X和Y压电换能器 - 的AFM图像进行测量时随着X和Y压电换能器的(Y-P)探针移动在光栅运动的表面上。 (FS)力传感器 - 力传感器通过监测悬臂的偏转来测量探针和样品之间的力。 (ZP)Z压电陶瓷 - 随着探头扫描X和Y压电换能器,将力传感器在垂直方向上移动到表面。 (FCU)反馈控制单元-反馈控制单元从轻杠杆力传感器接收信号,并输出驱动Z压电陶瓷的电压。这个电压是指在扫描时保持悬臂梁恒定偏转所需的电压。 (SG)X-Y信号发生器 - X-Y平面中的探头的运动由X-Y信号发生器控制。测量图像时使用光栅运动。 (CPU)的计算机 - 计算机,用于设置所述扫描参数,例如扫描尺寸,扫描速度,反馈控制响应和可视化用显微镜拍摄的图像。
(F)框架 - 一种固体框架支撑整个AFM显微镜。该框架必须非常刚性的,使得它不允许在尖端和表面之间的振动。 注:未显示为光学显微镜,用于定位样品表面特征和监测探针接近过程。 用原子力显微镜测量图像•将探头放在显微镜中并对准轻杆传感系统。 •用X-Y样品和光学显微镜放置将在AFM探针下直接成像的样品区域。 •使用Z平移台将探针带到表面。 •开始在表面上扫描探针,并在计算机屏幕上查看表面的图像。 •保存在计算机磁盘上的图像。 原子力显微镜的分辨率传统显微镜只有一种分辨率;图像平面上的分辨率。原子力显微镜有两种分辨率;测量的平面和垂直于表面的方向。 在平面内分辨率平面内分辨率取决于用于扫描的探针的几何形状。一般来说,探针越尖锐,AFM图像的分辨率就越高。下图是两个球体的理论线扫描,这两个球体是用一个锋利的探针和一个钝的探针测量的。 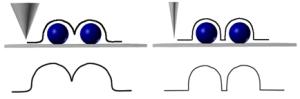
图6。右边的图像将具有更高的分辨率,因为用于测量探头是非常尖锐。 垂直分辨率原子力显微镜的垂直分辨率是通过探头在表面上的相对振动来确定的。振动的来源是声噪声、地板振动和热振动。为了获得最大的垂直分辨率,需要将仪器的振动降至最低。 探头表面的相互作用探针和表面之间的最强力是机械的,这是当探针上的原子物理地与表面上的原子相互作用时发生的力。然而,探针和表面之间的其他力可以对AFM图像产生影响。这些其他力包括表面污染,静电力和表面材料特性。 表面污染在周围空气中,所有表面都覆盖着一层非常薄的< 50纳米的污染层。这种污染可能由水和碳氢化合物组成,这取决于显微镜所处的环境。当AFM探针接触到表面污染时,毛细管力会将探针拉向表面。 静电力绝缘表面可以在其表面储存电荷。这些电荷可以与AFM探针或悬臂梁上的电荷相互作用。当扫描一个表面时,这种力非常强大,可以“弯曲”悬臂。 表面材料特性多相表面可以具有不同的硬度和摩擦的区域。由于探头在表面上扫描,探针的与表面的相互作用可以从一个区域移动到另一个时改变。在力的这种变化可以得到“对比度”是用于在异质的表面材料之间进行区分是有用的。亚博网站下载 地形模式当用原子力显微镜扫描样品时,悬臂末端的探针对样品表面施加恒定的力。利用悬臂梁测量原子力的方法有两种。第一种方法是直接测量悬臂梁的挠度。第二种方法是对悬臂梁进行振动,测量悬臂梁振动特性的变化。 偏转时利用AFM中的反馈控制,可以扫描具有固定悬臂挠度的样品。因为悬臂梁的挠度与作用于表面的力成正比,所以在扫描过程中,一个恒定的力作用于表面。这种扫描模式通常被称为“接触”模式。然而,由于探针在表面上的力通常小于纳米牛顿,探针最小限度地接触到表面。 
图7。在接触模式AFM中,探头直接遵循表面的形貌,因为它被扫描。而图像测量所述探针的力保持恒定。 振动模式在AFM悬臂可以使用压电陶瓷振动。当振动悬臂接近表面时,振动悬臂的幅度和相位可以改变。在振动幅度或相位的变化容易地测量和变化可以与表面上的力。这种技术有很多名字,包括非接触模式,和间歇接触模式。重要的是,尖端不是“抽头”的表面,因为探针可能被打破或者样品可能会被损坏。 
图8。在振动法中,监测探头振动的变化,以确定探头对表面的作用力。反馈单元用于保持振动振幅或相位恒定。 材料传感模式探针与表面的相互作用取决于表面的化学和物理性质。可以测量相互作用,从而“感知”样品表面的材料。亚博网站下载 振动材料传感模式如3.2节所述,在AFM扫描过程中,可以通过振动AFM悬臂梁来测量探针和表面之间的力。悬臂梁的幅值阻尼和相变量取决于表面的化学成分和表面的物理性质。因此,在不均匀的样品上,可以观察到不同机械或化学成分区域之间的对比。通常,在振动材料传感模式下,如果振幅被反馈单元固定,则通过测量相位变化来观察材料的对比度。这种技术有很多名字,包括相位模式,相位检测和力调制显微镜。 扭转模式在接触模式AFM中,可以监测悬臂的扭转运动,因为它在表面上扫描。 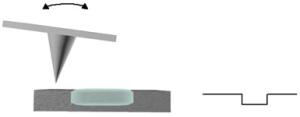
图9。用原子力显微镜测量悬臂梁的扭转。在悬臂的扭转变化是在表面的化学成分的变化的指示。 悬臂梁的扭转量受地形和表面化学性质变化的控制。如果一个表面是完全平坦的,但在两种不同的材料之间有一个界面,通常可以在表面上成像材料属性的变化。亚博网站下载这项技术类似于横向力显微镜(LFM)。 |