介绍磁性(MR)流体属于智能材料的一般类别,其流变特性可以通过应用电场来修饰[1]。亚博网站下载MR流体主要是由载体油中软磁料制成的颗粒分散。yabo214这些流体比常规机械接口的最重要优点是它们在毫秒的一小部分中实现广泛的粘度(几个数量级)的能力[2]。这提供了一种有效的方法来控制振动,以及用于致动,阻尼,机器人技术和机电货币的应用程序[2-4]。但是,通过使用动态仿真软件,可以分析由刚性或柔性零件组成的系统的行为和性能[5]。 目的车辆悬架系统的振动控制一直是研究的积极主题,因为它可以为驾驶员和乘客提供良好的性能[4]。最近,许多研究人员研究了MR流体在可控阻尼器中的应用中应用于半活性悬浮液。这项工作的目的是表征,确定数学模型并模拟MR流体在CAR悬架系统中的行为。 方法如上所述,首先,表征是通过实验和使用原型阻尼器进行的。在不同磁场的影响下,通过阶段测量了阻尼器的位移。随后,构成模型是在整个数学识别力 - 置换关系和等效阻尼系数解散的整个数学识别中开发的。多项式表达式作为电流的函数得出,作为独立变量和位移,力和速度作为因变量。最后,模拟分为两部分。第一部分;使用一个程序,其中使用本构模型来根据必要的电流和不同的行为模式来调整阻力阻力,以模拟几种道路。和第二部分;减震器阻力是由MSC Adams软件的模块ADAMSVIEW读取的,其中已对悬架系统进行了建模,以描述不同虚拟道路条件下的阻尼器位移。 系统描述用于该分析的MR流体如图1所示,它主要是纯度99.9%的铁粉末的分散体,作为载体油中的软磁性材料,并在ITESM上开发,蒙特雷校园。铁粒径分布的平均值15.53μM标准偏差为2.62μm。颗粒的形状yabo214不规则,固相的质量分数为60%。使用了商用机油。根据所施加的磁场,MR流体的粘度从800 cp到150000 cp不等。在磁场的影响下,液相在超过24小时后分离颗粒。yabo214

(A) 
(b) |
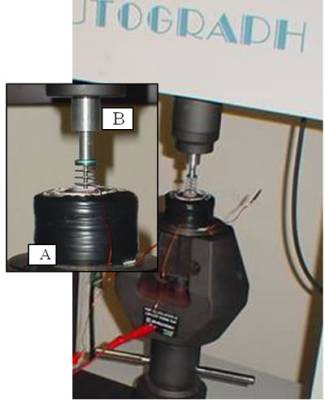
图1。(a)磁性流体和(b)原型阻尼器。 |
用于实验的系统由以下组件组成,并在图2中显示。
|
图2。实验安排。(a)线圈和(b)紧固件。 |
阻尼器是由铝制为0.112 m,直径0.014 m和3.6x10的原型-6m3容量。阻尼器内部使用的普通油已被磁性流体取代,在没有电流下,这种液体液具有与原始流体相似的行为。 线圈已设计为能够产生70.8 kam的磁场-1电流为3 aDC, and it was designed to be located around the damper.位置A中的A中。 一个特殊的固定肢体旨在将上部阻尼器部分固定到通用测试机上。图2中的位置B。 用于这项工作的通用测试机是Shimadzu AG-1 250KN,它允许力测量的精度为指示测试力的±1%。 MSC软件的模块ADAMSVIEW用于创建悬架系统的虚拟原型,并查看通常在物理上模仿数据的关键物理测量。 已经使用了等效的阻尼器系数(EDC)概念。如果活塞杆以速度翻译 ,这将要求被困在活塞的一侧的流体穿过活塞和气缸之间的空间。流体作用以等式给出的幅度相反。(1),其中c是等效阻尼系数。这是等效的,因为阻尼器在质量上施加的力不得偏离该表达式,无论我们移动质量的速度多快或慢[6]。 ,这将要求被困在活塞的一侧的流体穿过活塞和气缸之间的空间。流体作用以等式给出的幅度相反。(1),其中c是等效阻尼系数。这是等效的,因为阻尼器在质量上施加的力不得偏离该表达式,无论我们移动质量的速度多快或慢[6]。  (1)
(1)
结果先生阻尼的表征已经进行了磁性阻尼器的表征以获得表达式,该表达式表示其在不同磁场下的性能能力。这种表达式建立了可以完全使用可控阻尼系统的方式。 首先,有必要获取一组数据来确定力解散和EDC解散关系。阻尼器固定在通用测试机的分支上;同时,线圈位于阻尼器主体周围,如图2所示。测试都是在三角激发下以0.0007 m/s的恒定速度和通过线圈的不同电流强度下进行的,其从0.5到3安培不等。之所以选择0.0007 m/s的速度,是因为它代表低速,高等效阻尼系数此外还对电流具有明显的影响,如图3所示。参考文献[4]中也发现了类似的行为。 通过实验获得的关系如图3所示。
|
图3。EDC行为在不同速度下。 |
本构模型数学识别力置换关系是直接从完成的测试中获得的,EDC置换关系是通过使用EDC概念使用测试的恒定速度以及从以下数学模型获得的力来获得的。 宪法IVE模型是通过数学识别从测试中获得的关系 - 位置的数学识别获得的。功率方程式,等式。(2)已发现是位移,δ和电流的函数,即。图4和等式。(3),显示了3 A.的施加电流的结果。  (2)
(2)
在哪里ƒ是克服电阻以压缩阻尼器所需的力。和,δ是阻尼器中压缩给出的位移。  (3)
(3)
|
图4。关系力解析的数学识别。 |
一旦建立了所有方程,常数A和b如图5所示,绘制了绘制的,以获得一般的多项式表达式。(4)和等式。(5),电流的功能。  (4)
(4)
 (5)
(5)
|
Figure 5.分析(a)常数A(b)常数b。 |
最后,一个通用电源方程式,等式。(6),由两个多项式表达式构成:  (6)
(6)
如图6所示,获得并绘制了EDC,基于测试中使用的恒定速度以及在0.005 m,0.01 m,0.01 m,0.015 m,0.02 m,0.02 m和0.025 m位移时从方程(6)中获得的力。
|
图6。等效阻尼系数分析。 |
与先前的分析类似,通用电源方程式等式。(7)已获得:  (7)
(7)
数学模型与软件之间的连接可以通过在位移功能中引入等效阻尼系数表达来给出。 MR悬架系统的模拟计算软件的使用在设计中发挥了重要作用。计算技术被用来补充,加强,尤其是减少在实验和实际应用上花费的时间和金钱。 调整根据本构模型的阻力阻力如图7所示,在Adamsview软件中设计了四分之一的悬架汽车,基于商用车。悬浮液的分析是通过以16.6 m/s的速度模拟汽车和物体之间的碰撞来完成的。 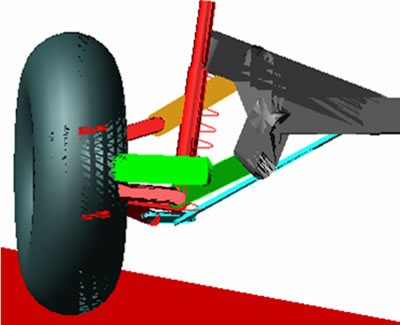
图7。四分之一悬架汽车模型。 设计完成后,通过引入一组数据点(允许基于内部功能)插入离散数据的软件来修改阻尼系数值。这种插值代表EDC方程。图8显示了修改的阻尼器force窗口和输入数据窗口。
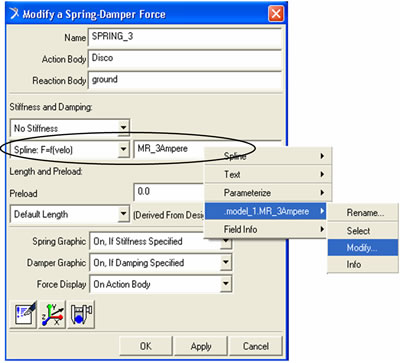
(A) 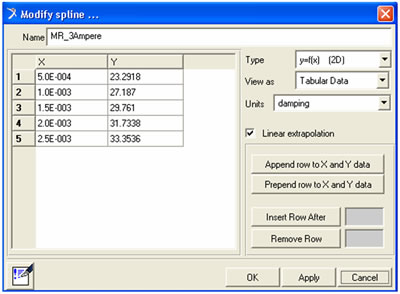
(b) |
图8。(A)减震器修改窗口和(b)数据输入窗口。 |
阻尼器在不同的虚拟道路条件下的位移根据比较分析获得的结果,如图9和10所示,被动和半活性悬架系统之间存在强烈差异行为。被动系统显示了阻尼器变形和底盘位移的急剧变化,同时,半活性系统根据各自的阻尼器位移显示了适应性行为。
(A) 
(b) 
(C) |
图9。在低(a)和高(b)磁场以及被动悬架系统(C)下,半活性系统之间的阻尼变形比较。 |
(A) 
(b) 
(C) |
图10。在低(A)和高(B)磁场以及被动悬架系统(C)下,半活性系统之间的底盘位移比较。 |
When the MR damper is under a low magnetic field the suspension system presents a smoother reaction compared with that of the passive suspension and a higher magnetic field. 根据从分析获得的结果,已经证明,ECD获得的方程使基于磁场诱导的悬架系统的适当响应成为可能。 一旦证明了MR悬架系统的行为,就必须开发和实施控制算法,以便该系统根据人类的道路条件和舒适性做出响应。 结论磁性流体已专门开发并掺入了也是专门用于此目的的阻尼器原型中。带有设计的负载电池的设置独立使用,并安装在签名的Shimadzu系统中,以确定不同力下的力,速度和位移。本构模型由由两个多项式表达式构成的数学功率表达给出,这些表达在电流中发挥作用。悬架系统取自实际使用的真实模型,用于其设计和出色性能的特征。模拟系统显示了运动并量化了力和位移。 从比较分析获得的结果显示了被动和半活动悬浮系统之间的巨大差异。从实验和模拟中,已经显示可以通过MR流体,电流,阻尼器设计和弹簧特性的物理特性来制作阻尼器的表征。In addition it has been shown that the use of ADAMS software is an excellent computational tool to simulate dynamic mechatronics systems. 最后,已经分析了可重构悬架系统。Its ability to change its rheological properties in addition to its quick response to the circumstances makes the MR technology a feasible way to develop other reconfigurable systems. 未来的工作Future work involves the introduction of a couple systems in the simulator in order to reproduce real events for driving, to determine the details of mechatronics control and to improve the coil’s design for its implementation in a complete prototype. 必须开发和实施控制算法,以便该系统根据人类所需的道路条件和舒适性做出响应。 References1。El Wahed Ali,K等人,“爆炸抗设计应用中的磁性流体”,《材料与设计》,23(2002)391-404。亚博网站下载 2。Bossis,G。等人,“磁性流体”,《磁与磁性材料杂志》,252(2002)224-228。亚博网站下载 3。Nakamura,Taro等人,“考虑其动态特征的均质ER流体设备的可变粘性控制”,Mechatronics,14(2004)55-68。 4。Yao,G.Z。等人,“ Danmper先生及其对车辆悬架系统的半活性控制的应用”,《机电一体化》,第12期(2002)963-973。 5。Ozdalyan,B。和Blundell M.V.,“亚当斯的反锁制动系统模拟和建模”,国际模拟会议,(1998年)140-144。 6。Cochin Ira and H. J. Plass,动态系统的分析和设计,哈珀·柯林斯(Harper Collins),纽约,纽约(1990)。 联系方式 |