评估摩擦学性能,如摩擦系数、摩擦力量,和扭矩任意材料对高精度对多个领域的研究和行业是至关重要的。实验室实验和测试是唯一可行的方法来生成摩擦学性能的定量评价。
尽管许多tribotesting可用选项,从商业摩擦计到自主研发的系统,获取准确和可重复的摩擦学的房地产测量仍然是一个挑战。这是由于材料的相互依存,表面上看,环境,使用的设备进行测量。app亚博体育
力量的城市轨道交通TriboLab™利用最具创新发展传感器技术与新6 d Force-Torque传感器。这个先进的传感器可以同时测量六张量分量(三股势力和三个力矩在x, y,和z轴,分别)。
基础载荷传感器促进较高的测量灵敏度和各向同性,同时保持低干扰测量轴之间在一个范围广泛的力量(1160牛顿的法线方向和最大扭矩20牛顿米)。
这些额外变量的同步测量,以及侧向力的差异,便于更好地理解的动态评估。的具体特点和测量优势TriboLab 6 d Force-Torque传感器是本文中概述。
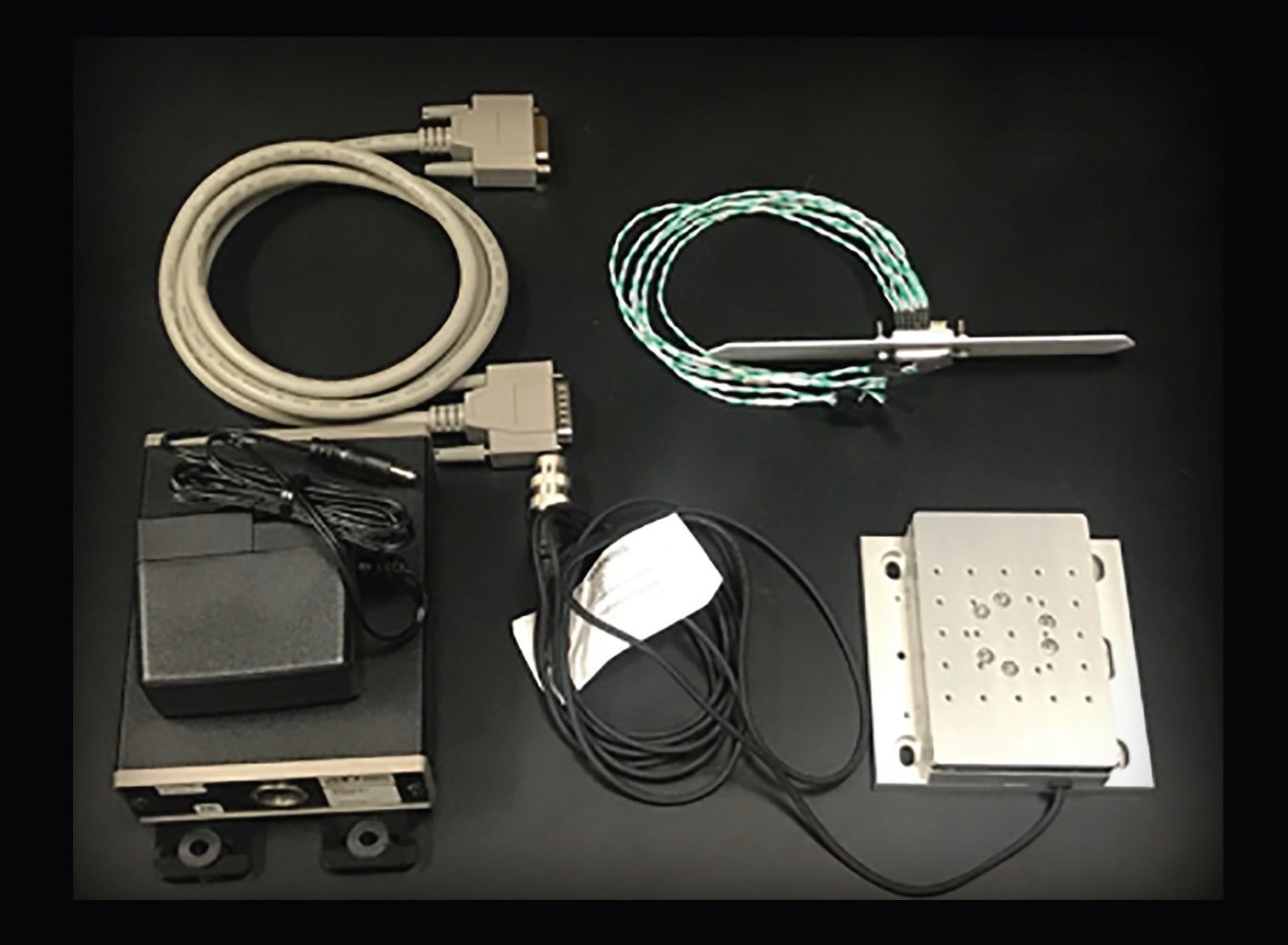
图1所示。城市轨道交通TriboLab 6 d Force-Torque负载细胞工具包。图片来源:力量纳米表面
高性能的传感器设计
force-torque传感器的架构的原则是建立在使用硅应变仪机械结构的变形。应变仪放置在一个兼容的结构,生成六频道的应变计电压输出。这些设备数字化并通过矩阵的计算转化为力量和扭矩。
传感元素的方便的位置在一个高度紧张的辐条,允许一个几乎恒定说表面的应变分布。恒应变分布补偿造成的负面影响应变仪定位错误,从而提高传感器的精度评价标准六力和扭矩组件(外汇、财政年度Fz, Tx,泰,Tz)。
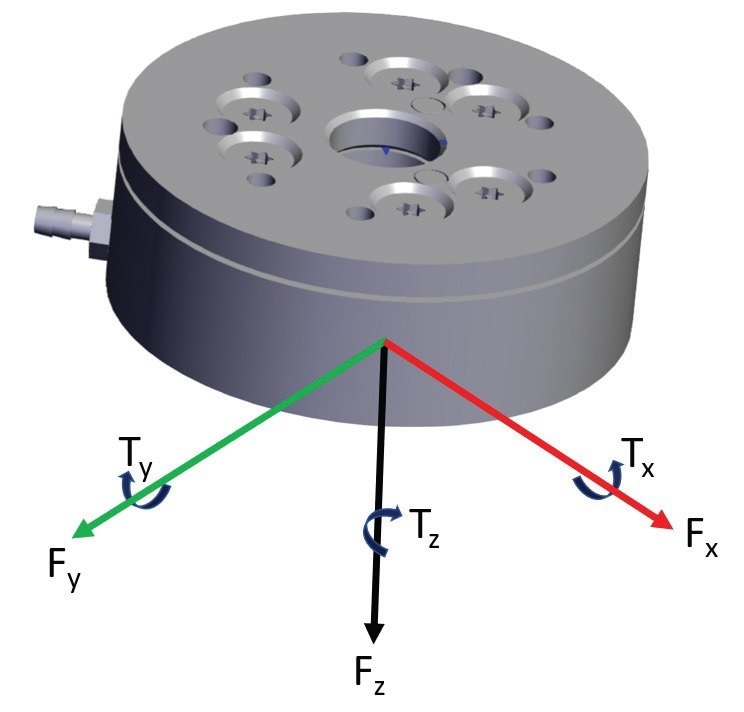
图2。force-torque传感器结构及其位置指示器。图片来源:力量纳米表面
宽的测量范围的好处
综合负荷传感器对多个测量
6 d Force-Torque传感器的独特设计了应变计传感器交付最优同时Force-Torque测量在一个广泛范围的力和力矩。
交付的实用性同时测量的力和扭矩在x, y和z轴是特别有用的计算宏观摩擦系数来追踪沿着一个界面摩擦力的分布。它也有助于评估外部接口的力矩,为局部应力评估是至关重要的。
6 d规格Force-Torque传感器可在三个不同类型的应用程序(见表1)。
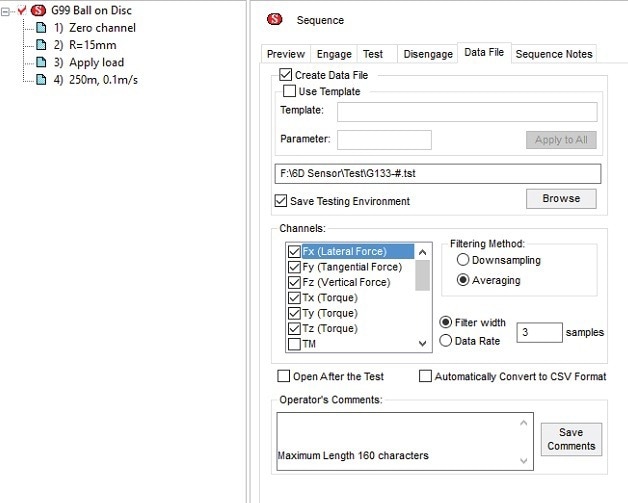
图3。force-torque传感器结构及其位置指示器。图片来源:力量纳米表面
表1。城市轨道交通的技术规格TriboLab 6 d Force-Torque传感器。来源:力量纳米表面
| 型号/规格 |
6 d-low |
6 d-mid |
6 d高 |
| 摩擦/侧向力(外汇、财政年度) |
| 范围 |
0 - 145 N |
0 - 290 N |
0 - 580 N |
| 决议 |
62.5 mN |
125 mN |
0.25 N |
| 加载(Fz) |
| 范围 |
0 - 290 N |
0 - 580 N |
0 - 1160 N |
| 决议 |
62.5 mN |
125 mN |
0.25 N |
| 转矩(Tx,泰) |
| 范围 |
5海里 |
10纳米 |
10纳米 |
| 决议 |
1海里 |
2.6纳米 |
5.3纳米 |
| 转矩(Tz) |
| 范围 |
5海里 |
10纳米 |
10纳米 |
| 决议 |
0.06纳米 |
1.3纳米 |
2.6纳米 |
优越的准确性和灵敏度
优质的原始输出信号是关键在试图减少摩擦和转矩系数测量的不确定性。最近的一项研究报道提高测量精度时定位力传感器尽可能接触表面。1
TriboLab和6 d Force-Torque传感器配置加强部队接触表面上生成,限制扭矩传感器和经历大大减少测量的不确定性。表2显示的平均全面测量误差低于2% 6 d Force-Torque传感器。
表2。精密测量(95%置信水平,全面的负载的百分比)为6 d-low, 6 d和6 d高Force-Torque负载细胞在环境条件进行测试。来源:力量纳米表面
| 型号/规格 |
外汇 |
财政年度 |
Fz |
Tx |
泰 |
Tz |
| 6 d-low |
1.25% |
1.00% |
0.75% |
1.25% |
1.50% |
1.25% |
| 6 d |
1.00% |
0.75% |
0.75% |
1.00% |
1.25% |
1.25% |
| 6 d高 |
1.75% |
1.25% |
1.00% |
1.25% |
1.75% |
1.00% |
表2中所示的测量表明的最大误差定义为一个百分比的全面为每个轴负载。除了微不足道的精密测量的不确定性,6 d Force-Torque传感器展示优秀的稳定性在长时间(请参见图4)稳定的垂直荷载,在温控实验(见图5)。这些品质是必不可少的校准传感器的目标准确的摩擦学的数据。
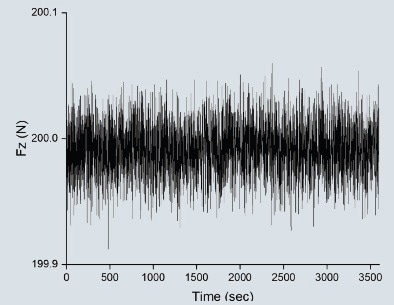
图4。200 N的力是应用到钢试样1小时。记录的6 d Force-Torque传感器的噪声水平不到0.05%的全面的价值观。图片来源:力量纳米表面
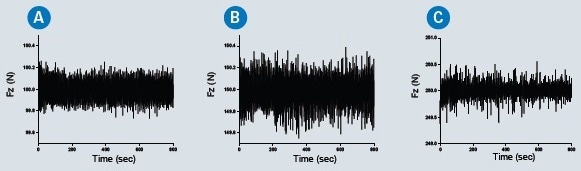
图5。6 d Force-Torque传感器经验最低热漂移效应作用力(a) 100 N, 150 N, (b)和(c) 250 N,分别在200°c。图片来源:力量纳米表面
消除工件的高精度测量
典型的动摩擦系数(Fz)和切向(外汇、财政年度)部队,以及它的转矩(Tx,泰和Tz)限制,摩擦学的基本调查应用程序至关重要。
然而,失调问题时往往会产生力和力矩传感器分别组装运行这些测试,鼓励不同信号途径之间的串扰和侵犯摩擦学的数据的准确性。
单细胞的设计力量的6 d Force-Torque传感器限制相声的不到1.5%,研究人员提供相关和准确的数据为每个摩擦学试验(参见图6)。此外,城市轨道交通软件使用户能够补偿和抵消噪声偏差在测试。
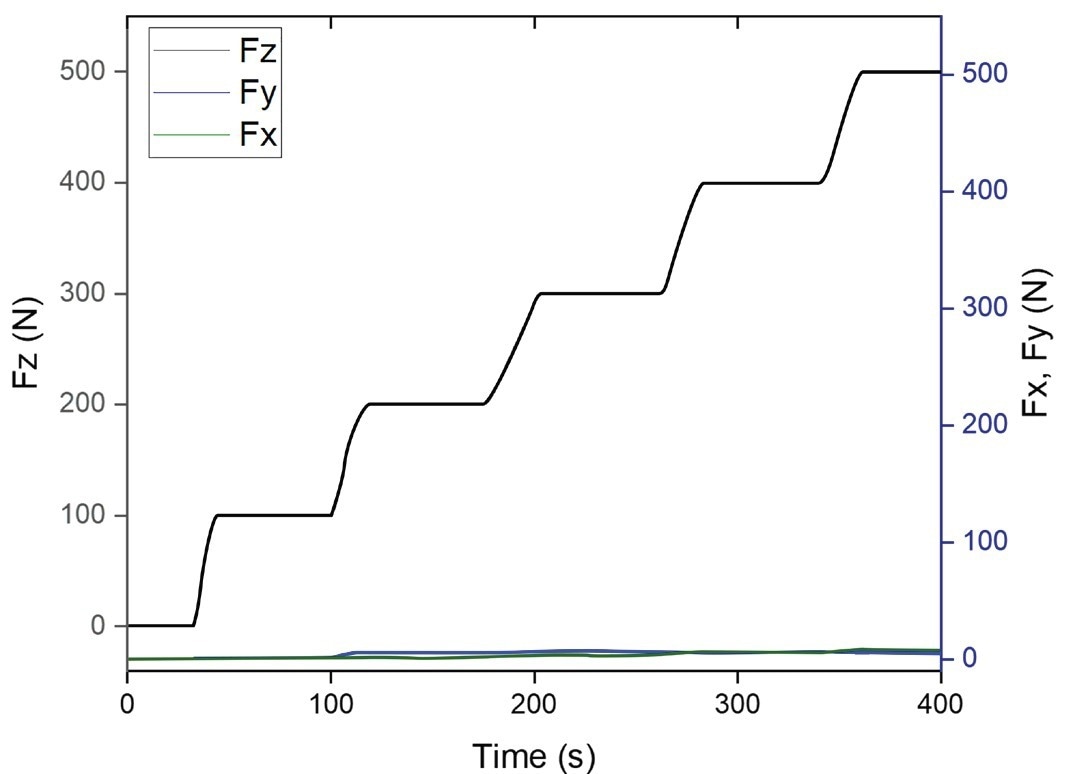
图6。最小的正常负载之间的串扰Fz和侧向力传感Fx /财政年度。图片来源:力量纳米表面
产品兼容减少足迹
6 d Force-Torque传感器是完全兼容当前城市轨道交通TriboLab配置,允许无缝集成到现有的经验。传感器是一个即插即用的外围,可用于结合快速交换设备(AM30C413),快速交换板(M30C784)和2英寸(M30C366-1 M30C366-2)或4英寸扩展块。
各种上层标本可以用于此配置来满足一个广泛范围的测试条件和应用程序。
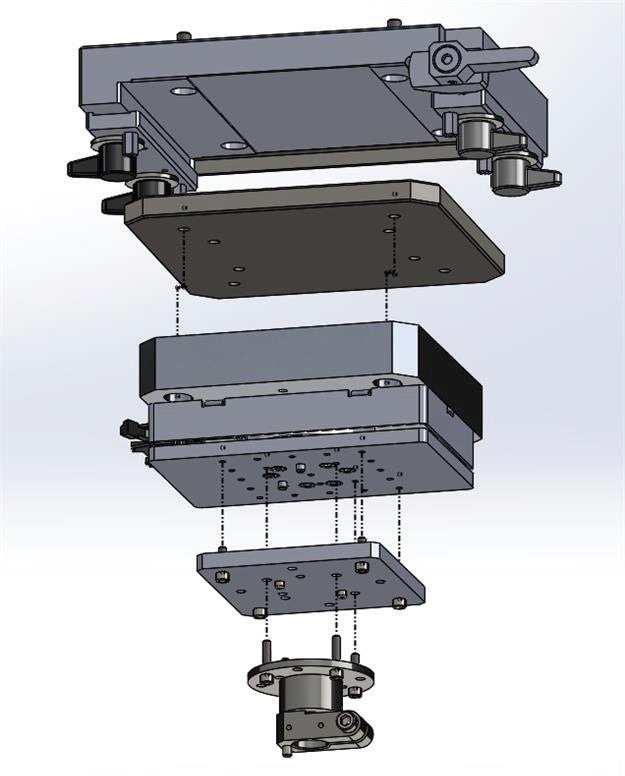
图7。6 d Force-Torque传感器的组装关系图。图片来源:力量纳米表面
实验应用
力量的城市轨道交通TriboLab是一个创新的模块化平台用一个高扭矩电机内置系统的基础来促进一个广泛范围的速度和扭矩测试。
结合先进的6 d Force-Torque传感器,TriboLab提供复杂的运动和高度精确测量周围多个轴,一个基本的摩擦学研究和工业应用要求。
旋转测试
扶轮测试是一个常用的摩擦磨损测试方法在实验室和工业领域。在这个测试中,一个球或针下放置6 d Force-Torque传感器,和一个标准的磁盘合并为更低的标本(见图8 a / b)。
在这里,跨几个轴力和力矩测量获得摩擦系数和转矩系数。
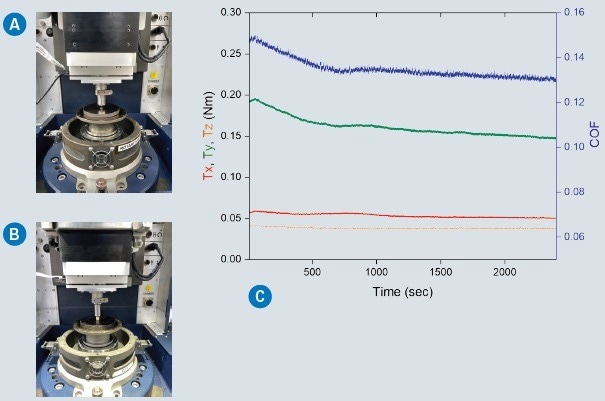
图8。城市轨道交通TriboLab旋转测试模块6 d Force-Torque传感器;(一)ball-on-disc pin-on-disc测试(b)和(c)的动态摩擦系数和扭矩与时间。图片来源:力量纳米表面
测量多个轴非常有助于更好的理解tribosystem的摩擦磨损行为。原位摩擦系数测量认为外汇和财政年度的贡献,所代表的数学方程咖啡=√(外汇2+财政年度2)/外汇。
在高速旋转tribotests,多余的运动联系合作伙伴由于宽松组装或破损事件将产生不利影响的测试。6 d Force-Torque传感器允许用户方便地识别这些问题通过实时监控沿着x和y轴的扭矩输出(参见图8 c),任何失败都可以立即解决。
制动器和离合器材料筛选亚博网站下载
刹车和离合器材料筛选测试的思路TriboLab一直故意设计成有成本效益的和快速的方法来筛选和等级材料之前在组件级别的评估。亚博网站下载
这种方法允许小的摩擦材料的摩擦磨损性能样品准确和方便。这看起来虽然监控重要参数,如摩擦、滑动速度、温度和磨损。
缩小的方法通常被用来复制,不断匹配车辆制动系统的关键物理参数受雇于测SAE J2522等协议。
6 d Force-Torque传感器艾滋病筛查测试过程通过允许同时多个轴测量,以更好地理解动态tribosystem的行为。
图9显示了一个标准设置的TriboLab制动材料筛选与内置的6 d Force-Torque传感器。转矩输出(Tx,泰和Tz),如图9所示,是传感器提供了新的输出特性。它使更好的评估机制的制动失效的制动衬片材料热恶化。
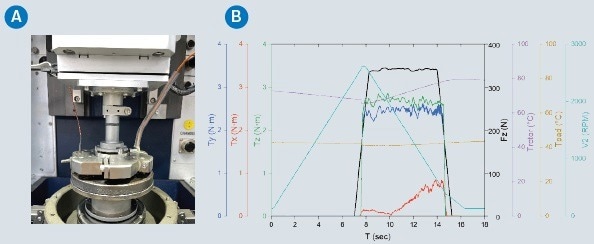
图9。(一)城市轨道交通TriboLab制动材料筛选测试6 d Force-Torque传感器,和(b)仿真的怠慢由不同的速度从2620年到131 rpm (100 - 5 km / h车辆速度)在8秒,在354 N的作用力(2 MPa接触压力)。图片来源:力量纳米表面
在表3中,额外的应用程序可以获得一个优势从6组件的力和力矩,包括四球试验、扭转压缩试验,和sliding-to-rolling率测试,显示。
表3。使用6 d Force-Torque传感器的优点来执行ASTM标准测试。来源:力量纳米表面
| ASTM # |
描述 |
优势 |
| D4172-20 & D2266-01 |
抗磨润滑液的特点和油脂(四球法) |
多方向的转矩输出信号使球滚动的快速识别和四球杯座滑动。 |
| D5183-21 |
润滑剂的摩擦系数测定(四球法) |
| D2596-20 & D2783-19 |
耐特高压润滑流体的性质和测量油脂(四球法) |
| G99-17 |
穿Pin-on-Disk仪器测试 |
应用与稳定的最小热漂移的影响,适用于长时间测试。 |
| g132 - 96 (2018) |
销磨损测试 |
| d3702 - 94 (2019) |
材料的磨损率和摩擦系数使用推力垫圈试验机润滑摩擦接触亚博网站下载 |
载荷传感器的灵敏度提高了自流平止推垫圈上样品的测试。 |
| D5619-00 & D8288-19 |
比较金属切削液 |
Cross-threading在开发可以很容易地识别和预防。 |
总结
力量的城市轨道交通TriboLab force-torque来说是不可或缺的摩擦计测量在一个广泛的研究和行业范围的力和力矩,包括精密科学仪器,致动器,汽车、机器人传感器、micro-manipulators和润滑应用程序。
最新的6 d Force-Torque传感器,TriboLab提供:
- 高精度测量,解决干涉测量轴之间在多个方向。
- 线性响应和固有频率高,过载保护。
- 独立解决方案同时力和力矩测量。
TriboLab最终能够运行一个广泛范围的摩擦、磨损和润滑测试,符合各种国际公认的标准,如ASTM、ISO、DIN、SAE等等。
引用
- 格雷戈勒,C。,Laulagnet B。Perret-Liaudet, J。杜兰,T。夹头,M。Scheibert, J。、设计和特性的检测滑块旨在衡量当地microimpact部队之间的干燥粗糙的固体。传感器和执行器:物理,317,112478,(2021)。
- Ballo F。米兰球迷,M。Mastinu, G。Previati, G。力和力矩测量的发展,一个创新的基础上负载细胞。实验力学,54 (4),571 - 592,(2014)。
- 北卡罗来纳州Heglund,一个简单的设计力板测量地面反应部队。j . exp。杂志。,93,(1981)。
- SAE J2522测力计全球制动效能,SAE国际(2013)。
- 继续ASTM G09-05(2010),穿的标准测试方法测试Pin-onDisk装置,ASTM国际,西肯肖霍肯的PA, (2010)。