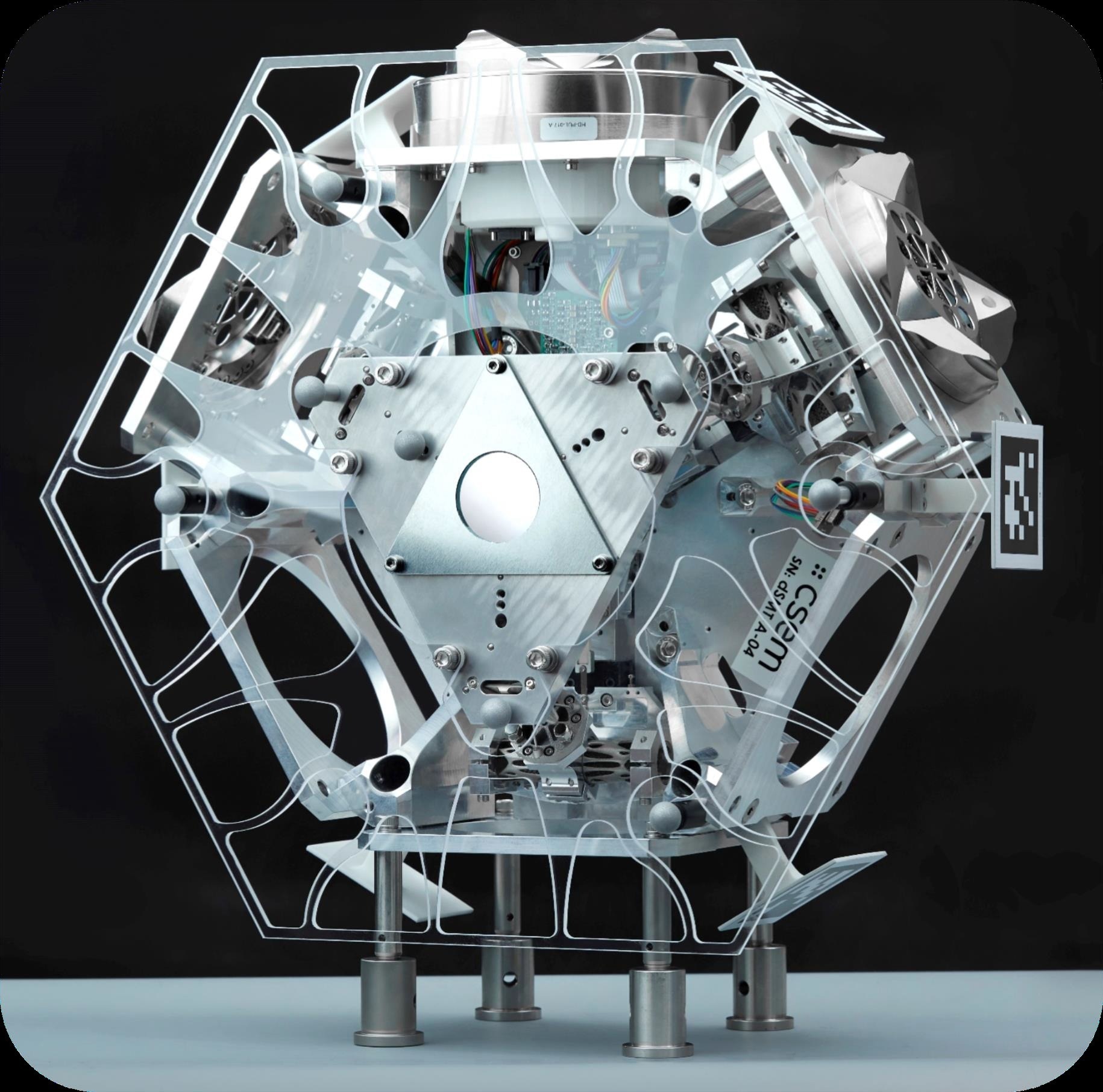
CSEM作为PULSAR H2020项目的一部分生产了单镜瓷砖示威者(SMT),其中包括可以修改六边形镜的位置以补偿由轨道内机器人组件引起的缺陷的定位机制。
镜像位置由这种机制控制,具有三个自由度(活塞翻译,尖端和倾斜旋转)。CSEM在合规机制和添加剂制造应用于科学仪器对于空间应用,有助于瓷砖的设计。
图片来源:CSEM
关键规格和设计元素
表格1。来源:CSEM
| 规格 |
价值 |
| 自由程度 |
3:活塞,尖端和倾斜 |
| 活塞中风 |
±3毫米 |
| 活塞分辨率 |
1 µm |
| 活塞可重复性 |
<5 µm |
| 角中风 |
±1° |
| 角分辨率 |
4 µRAD |
| 角重复性 |
<20 µrad |
| 瓷砖形状 |
六边形 |
| 群众预算 |
<9公斤 |
| 方面 |
宽度<400毫米 |
瓷砖运动结构
对于三脚架的每条腿,都有一个合规的结构:
- 径向连接的线性指南
- 具有单轴的弯曲枢轴
- 带有三重轴的弯曲云台
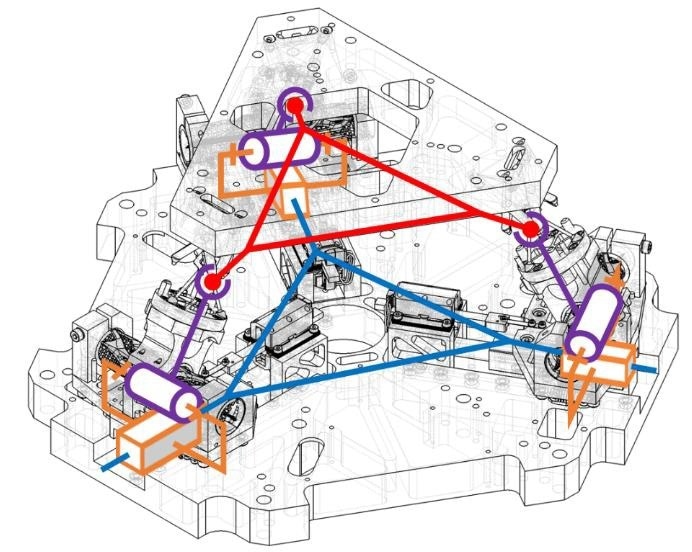
图片来源:CSEM
线性机动阶段
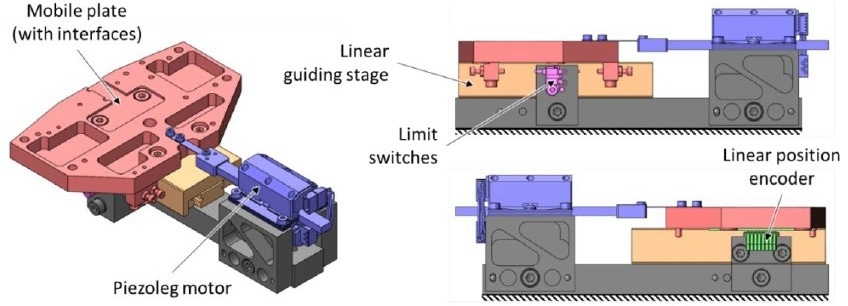
图片来源:CSEM
灵活的传输阶段
图片来源:CSEM
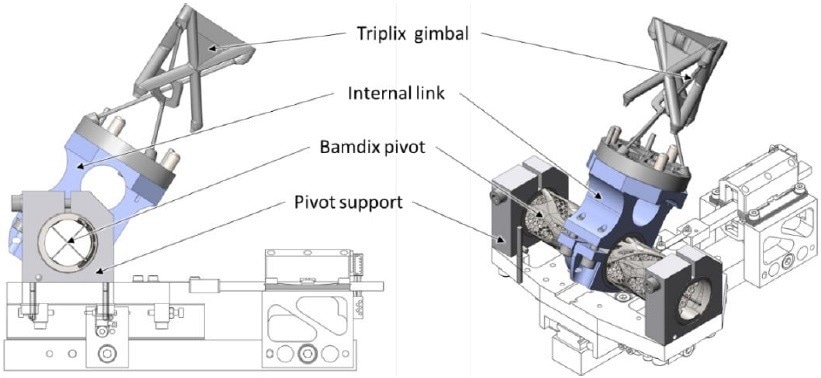
灵活的枢轴和gimbal(通过SLM添加剂制造在内部设计和生产)
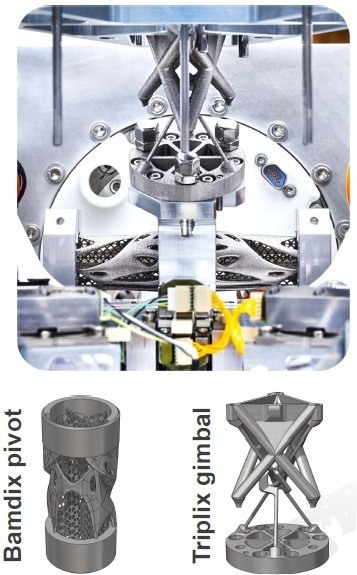
图片来源:CSEM
校准和性能
校准
- 为了将电动机坐标与线性阶段位移相关联,创建了查找表。
图片来源:CSEM
- 由于分辨率优于350 nm
- 精度在±1.5 µm范围内
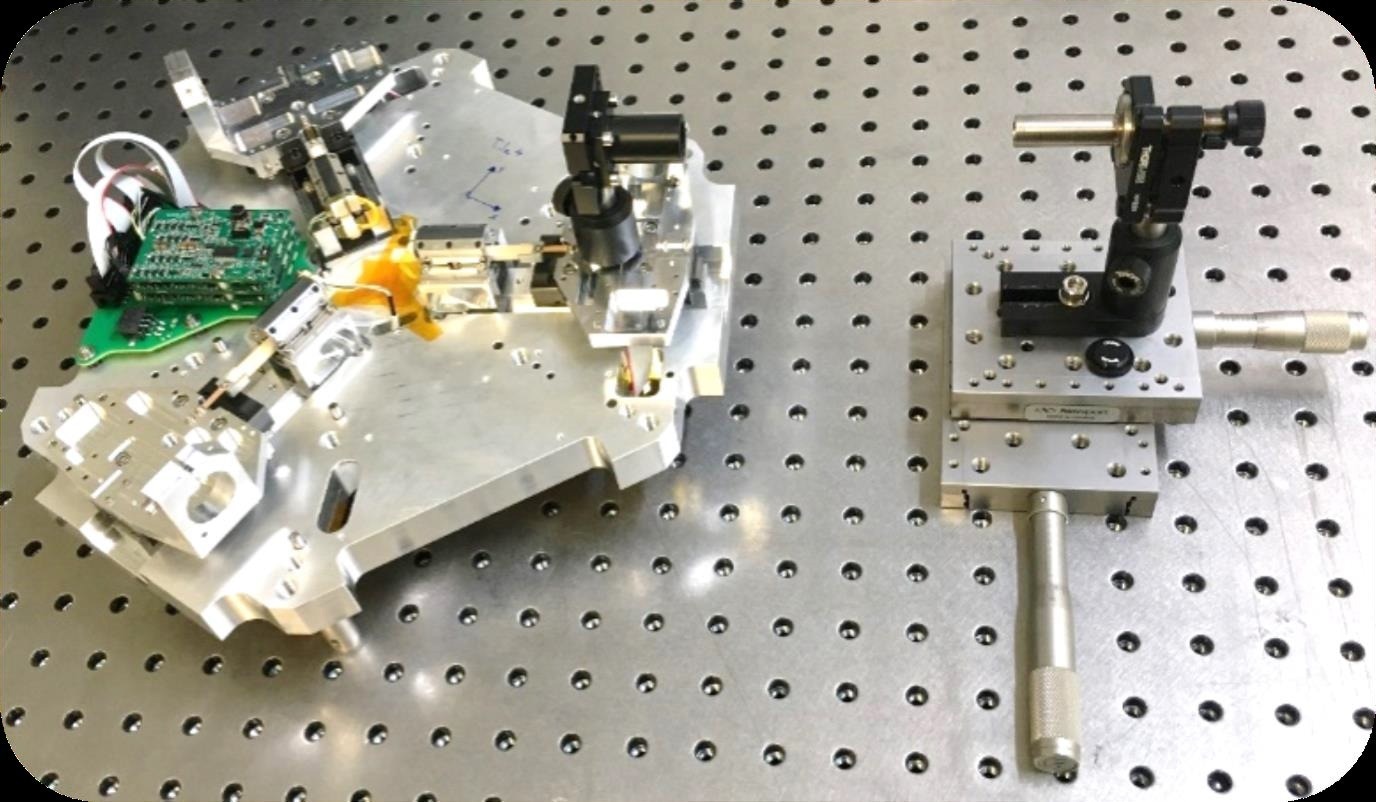
瓷砖校准设置
- 为了测量活塞位置以及尖端和倾斜角,使用了一个符合三个面向三个逆转录器的头部的自动映射器和干涉仪。
瓷砖校准过程
- 使用FEM模型,确定初步的几何模型(IGM)
- 使用初步IGM计算多个镜像的坐标
- 使用逐步回归方法确定多项式模型的现实世界过程IGM建模
图片来源:CSEM
性能验证
- 使用8000个测量位置计算瓷砖的几何模型
- 组装,校准并确定两个瓷砖
- 计算所需的镜像位置和测量位置之间的差异是在整个位置空间上的512个位置计算的
表2。来源:CSEM
| 表现 |
瓷砖1 |
瓷砖2 |
| 错误 |
提示[µRAD] |
倾斜[µRAD] |
活塞[µm] |
提示[µRAD] |
倾斜[µRAD] |
活塞[µm] |
| 意思是 |
36.13 |
-46.65 |
-2.12 |
9.96 |
-25.53 |
0.78 |
| 标准偏差 |
88.02 |
86.84 |
5.44 |
98.97 |
100.35 |
6.18 |
| 最大(ABS) |
286.87 |
268.96 |
16.25 |
362.19 |
305.79 |
19.06 |
- 在整个机理的整个中,两个瓷砖的总体镜位置精度约为100 µrad,尖端和倾斜旋转,而活塞翻译中约为7 µm。
可重复性测量
- 可重复性值是通过实现瓷砖1和91个镜子位置的64个镜像位置来计算的。将这些位置的序列随机分组,以确保不会存在偏见。
表3。来源:CSEM
| 可重复性 |
瓷砖1 |
瓷砖2 |
| 提示 |
5.98±1.54 µRAD |
8.01±3.89 µRAD |
| 倾斜 |
3.69±1.25 µrad |
3.67±1.15 µRAD |
| 活塞 |
0.61±0.23 µm |
0.33±0.16 µm |
- 该机理的角度可重复性在尖端和倾斜度中小于10 µrad,而活塞中的角度可重复性小于1 µm,这一点远低于项目的要求。

此信息已从CSEM提供的材料中采购,审查和调整。亚博网站下载
有关此消息来源的更多信息,请访问CSEM。