哥伦比亚可以提供广泛的力量平衡伺服加速度计和进入倾斜度,专门为工业提供各种尺寸,配置和性能水平,O.E.M。和军事要求。
一些哥伦比亚力量平衡传感器根据所有相关的MIL标准/商业标准,已在飞行中有资格,目前正在美国政府最具挑战性的军事飞机机上武器系统中使用。
哥伦比亚还开发了由联邦航空局(F.A.A.)批准的伺服加速度计,用于飞行航空电子,商业和通用飞机飞行控制系统。
在过去的三十年中,关键应用的可靠产品性能一直是哥伦比亚力量平衡伺服加速度计和进入斜率计的核心特征之一。
哥伦比亚设施
在超过50年的时间里,自给自足的核心一直是哥伦比亚运营的核心:依赖于关键组件,材料和服务的外部来源。亚博网站下载
哥伦比亚制造了内部微型和高性能惯性产品中使用的所有扭矩机制。这样做是为了保证关键组件的一致可用性和精度。
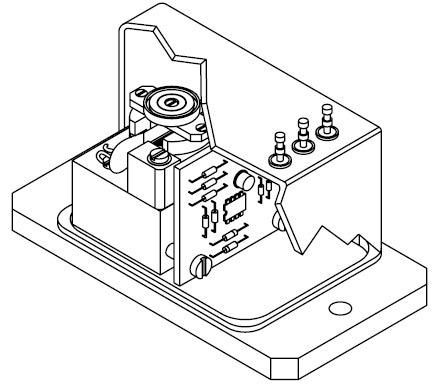
图1。力平衡传感器。图片来源:哥伦比亚研究实验室
使用高速,高效,数值控制的机器在哥伦比亚的现场商店设施中对哥伦比亚力量平衡加速度计的扭矩零件,住房和硬件制造。
哥伦比亚扭矩中没有任何零件。所有零件均以精确的精度进行加工,并符合严格的标准。关键的组装操作是在“有限的访问白房间”中进行的。
哥伦比亚还具有“内部”,正弦和随机振动,冲击,角度和线性加速度以及温度的特殊环境测试功能。
哥伦比亚设施和所有哥伦比亚的流程和程序都经过了质量调查,并被证明完全符合联邦政府质量保证文件MIL-Q-9858 / MIL-I-45208。
微妙的细节,例如身份雕刻,标签和数据表打印,是在哥伦比亚“内部”功能曲目的一部分上在现场进行的。
哥伦比亚设施和能力的持续扩展可以确保能够快速响应客户在力量平衡加速度计中定制包装或性能的经济需求,并保证任何地方可用的产品性能和准确性。
技术信息
伺服力平衡加速度计可以提供出色的性能和准确性优势。这一事实在其广泛的应用程序中很明显,因此需要0.1%或更高的总体准确性。与传统的加速度计不同,伺服类型融合了受电气等效机械弹簧的自由悬浮质量。
伺服力平衡加速度计分为两类:垂悬型,具有不平衡的旋转质量,具有角位移,而非倾斜类型具有线性位移的质量。
所有加速度计的行为可以用牛顿的第二项运动定律来解释:力等于质量乘以加速度。
F= ma
该方程强调,如果要加速质量,则必须存在比例力。如果可以测量力,则可以确定加速度的量。
对于垂直型加速度计,方程式的极性形式适用:扭矩等于垂直质量乘以加速度。
t =(ml)一种
其中(i)代表着从旋转轴到质量中心的距离,(ml)代表垂直质量。
为什么选择力平衡传感器?
力平衡传感器的预期用途用于DC和低频加速度测量,例如在飞机,车辆和船只的运动中发生的。这些传感器的能力可以在从直流到1000 Hz的频率范围内测量低至0.000 g至200 g的水平。
此外,由于其对重力的天生敏感性,具有特定修改或内置特殊特征的力平衡加速度计成为测量倾斜度角度的优越仪器。
这种传感器(通常称为倾斜度计)在平台级别,枪支控制,管道级别,钻孔映射和其他低级地震测量应用等应用中是实用的。
好处
力平衡传感器配备了许多优势,这些优势在一系列应用中,包括上述应用程序中的卓越性能。
任何加速度计内的内部位移通常以过度滞后,粘性,非线性和不可更可重复性的形式产生不准确性和错误。
LVDT,电位计量,可变不情愿和其他相对传感器倾向于产生此类错误,因为传感元件必须传递一定距离才能产生可测量的输出变化。
相反,来自力平衡加速度计的输出信号并不取决于内部元素的位移是加速度的线性函数。内部位移保持相对较小,通常约为十分之一英寸或更短。
除了减少与力平衡传感器相关的微小位移的显着减少静态误差,这有助于这些传感器具有相对较高的固有频率。过度的内部位移不是应变量规传感器的要求,但它们可能会遭受与温度,蠕变和衰老的影响有关的不稳定性。
与需要粘性介质,仪表板或类似机械阻尼技术的其他低频加速度计相反,力量平衡传感器的动态响应可以通过电子网络的方式进行阻尼并轻松调整到精确的值。
对于最大可用响应,或对高频的较高程度或有限的响应和敏感性,可以将阻尼评分设置为关键。通常,在开放循环类型的传感器类型中,阻尼比不能像通过粘性介质的压电设备那样控制。
在这个最后的实例中,不可能通过任何紧密的公差来控制阻尼评分,这是因为粘度变化与温度。大量的应变量规,电位计量学或LVDT类型加速度计结合恒温控制的加热器,以试图稳定阻尼特性。
此外,在大多数情况下,力平衡加速度计是完全自控的,不需要其他信号调节,并且具有直接与数据采集系统,示波器,光谱分析仪,数字伏特仪和显示器直接接触的能力。
全尺度输出通常按几伏的顺序排列,不需要进一步扩增。
力平衡传感器如何工作
力平衡传感器由位置检测器组成 - 不一定是线性的 - 放大器和机电系统。
这种组合具有执行将机械力转换为比例电流的功能的能力,后者又转化为相等的相对机械力。
位置检测器监测质量与力发生器的位置。外部诱导的质量位置差异会产生组合位置检测器,放大器输出,例如力发生器将质量推回其起始位置。
传感器的输出测量通过力发生器的电流。该电流与恢复力成正比,该恢复力与输入力相等且相反。输入加速度通过校准质量与输入力相匹配(见图2)。
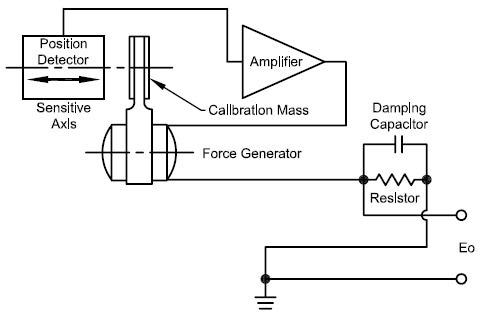
图2。力平衡传感器的黑色图。图片来源:哥伦比亚研究实验室
当不存在加速度时,通过力发生器的电流降低至零。可以通过串联使用电阻来追踪力发生器电流,从而使电压输出与原始机械输入完全成正比。
电子阻尼由电容器促进并跨采样电阻。
电容器和采样电阻包括铅网络,该铅网络在驱动恢复电流所需的放大器电压的高频下产生降低。图3显示了应用于常规力量平衡加速度计的频率响应与阻尼比之间的关系。
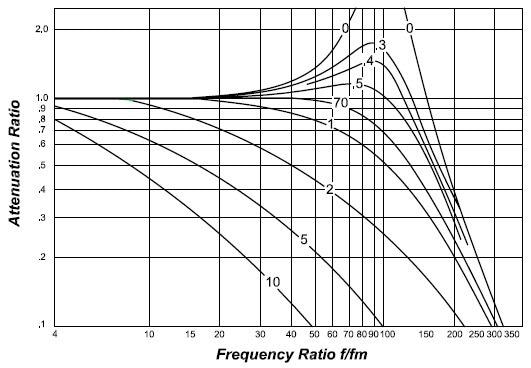
图3。频率响应。图片来源:哥伦比亚研究实验室
哥伦比亚“ H.P.”(高性能扭矩)
力平衡加速度计需要悬浮质量,以将加速度转化为可测量的力。还必须存在一种手段以通过磁路中的线圈施加电流,以平衡由应用加速度引起的力。
该组件被称为“力量平衡圈”,称为伪造者或扭动。
扭动的关键,基本要求是用于最佳支持质量的方法。优选地,支撑手段应仅以一个单一的,公认的方向移动质量,同时又可以消除运动在横向方向上的剩余运动。
此外,支持不应引入任何自己的力量,例如摩擦或弹簧效应。质量支持应足够强大,以忍受所需的物理环境而不会恶化。
加速度计制造商合并的三种常用方法包括:弯曲,拉紧带和轴承。挠曲和拉紧的频带系统都具有相似的利弊。它们有效地无摩擦,因此产生了出色的可重复性结果。
该弯曲具有出色的敏感轴定义,而绷紧的频带则需要支撑,因为在流体中横轴载荷下方下垂,以限制其对交叉载荷和振动的敏感性。
两者都容易受到冲击的伤害。金属弯曲可能会经历永久变形,导致零偏置错误,而脆弱的非金属屈曲骨折可能在相同情况下灾难性地失败。
僵硬的屈曲还因其固有的自我恢复趋势而产生非线性输出特征。这种非线性在轴承类型加速度计中并不明显。
哥伦比亚加速度计结合了轴承以支撑垂直质量。最具成本效益的哥伦比亚加速度计使用枢轴和珠宝轴承。该系统适用于成本是关键因素,环境要求和精度灵活的应用程序。
更先进的哥伦比亚加速度计利用高性能滚珠轴承悬架代替枢轴和珠宝。这些轴承的物理耐受性比传统的枢轴和珠宝轴承更高20倍以上。
他们的性能以最佳的弯曲为止,与此同时,他们具有在严重的冲击和振动环境中生存的能力。
其他优势哥伦比亚“ H.P.”TRECER提供的报价包括没有枢轴流动,低矫正,没有进行性降低和振动下出色的静态性能。
所有库存和“ H.P.”扭矩在哥伦比亚的现场生产,以确保“单位至单位”的可靠性和性能一致。
特征的解释
本节是指可以帮助支持特定应用的力量平衡传感器的评估和选择的许多规格。
比例因子
比例因子是输出比率变化与预期输入的变化,用于测量或应用。标准的比例因子校准哥伦比亚加速度计表示为Volts/G或Volts/Radian/sec2。倾斜计的比例因子也表示为伏特/g。但是,必须将其与以下方程式配对,
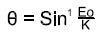
为了确定测量的角度;EO是测量的输出,k强调输出在90°或一个g处(见图4)。当倾斜计与经过校准以直接读取的倾斜度配对时,无需转换。
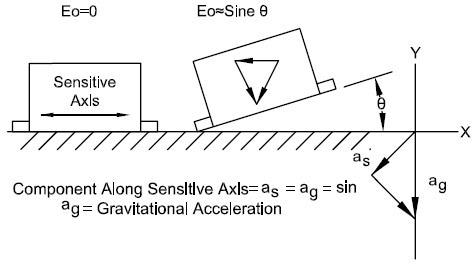
图4。比例因子。图片来源:哥伦比亚研究实验室
偏见
当没有机械输入应用时,偏置是测量的传感器输出。
输入轴
输入轴是沿轴沿着该轴,最大输出是由外壳的加速度或倾向引起的。
横轴灵敏度
跨轴灵敏度是指比例地将加速度计或倾斜计输出变化与交叉加速度或倾斜度相关的常数。
复合误差
复合误差是指输出数据与指定的输出函数的最大偏差。复合误差可能包括输出数据中磁滞,分辨率,非可重复性,非线性和其他未知数的影响。它通常表示为输出范围的百分比。
可重复性
可重复性是传感器在重复输入和环境条件下重现给定性能特征输出的能力。可重复性由其他性能特征阈值,分辨率和不确定性的影响组成。
非线性
非线性是指输出数据与由零输入偏差和比例因子系数确定的直线的偏差(见图5,非线性)。
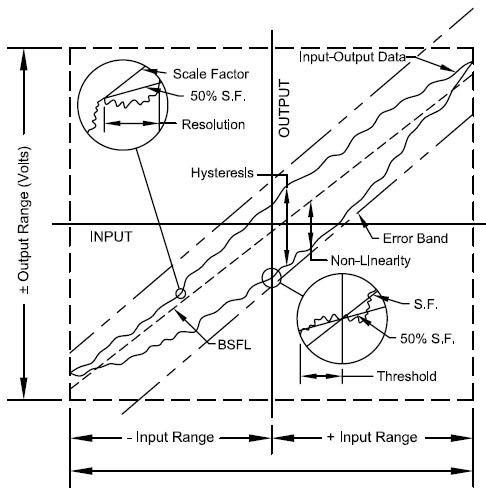
图5。典型的力平衡加速度计的输入输出特性。图片来源:哥伦比亚研究实验室
磁滞误差
磁滞误差是指在该输入下增加和减少输入的输出信号之间的差异,以通过输入扫描测量最大差异(见图5,滞后)。
解析度
分辨率是输入最小变化的最大值,而不是阈值,该阈值的输出的变化与某些特定百分比(至少50%)的变化相当于预期的输出变化(使用标称尺度因子)(请参见图。5,分辨率)。
临界点
阈值是使用名义量表因子的最小输入的最小输入的最大绝对值(至少占预期输出)的最大绝对值(见图5,阈值)。
纠正误差
整流误差是由在加速度计或能力计上作用的振动干扰引起的输出中的稳态误差。
该信息已从哥伦比亚研究实验室提供的材料中采购,审查和改编。亚博网站下载
有关此消息来源的更多信息,请访问哥伦比亚研究实验室公司