使用放射疗法治疗肿瘤是医疗技术的最新进步变得越来越普遍。
Recent developments have made this approach less intrusive and more cost-effective than traditional treatments, such as surgery and chemotherapy. It has also demonstrated better performance than these approaches in the treatment of many types of tumors.

图片来源:PI(Physik instrumente)LP
运动和定位系统通常用于外束放射疗法通常应用于位于乳房,头部,肺和前列腺的肿瘤。这种治疗的目的是消除肿瘤细胞,而不会损害周围的健康组织,要求患者相对于梁的精确定位。
A定位分辨率根据人类细胞的平均大小,建议使用高达0.03毫米。
图像引导放疗的应用
Many current installations are comprised of IGRT (Image Guided Radiotherapy) systems. These systems typically utilize one or more methods to ascertain the position of a topical patient and tumor prior to and during radiation treatment.
这些方法包括:
-
光学身体表面分析
-
X射线扫描
-
磁共振成像(MRI)
-
Thermal imaging (an extra means of monitoring the patient’s position)
These methods aim to ensure patient-friendly, frameless stereotactic radiosurgery (SRS); for example, in the treatment of brain tumors.

基于可见光的光学身体表面分析。图片来源:PI(Physik instrumente)LP

X射线扫描精确地确定了肿瘤的位置和局部位置。图片来源:PI(Physik instrumente)LP
使用基于LINAC的设备时,必须将患者精确地与3D记录的数据和辐射源相关。这是通过以前拍摄的叠加图像来完成的。
多度自由(DOF)手术台(患者沙发)是该过程精确度的关键。该表用于在辐射治疗开始之前将患者移动和定向到正确的位置。
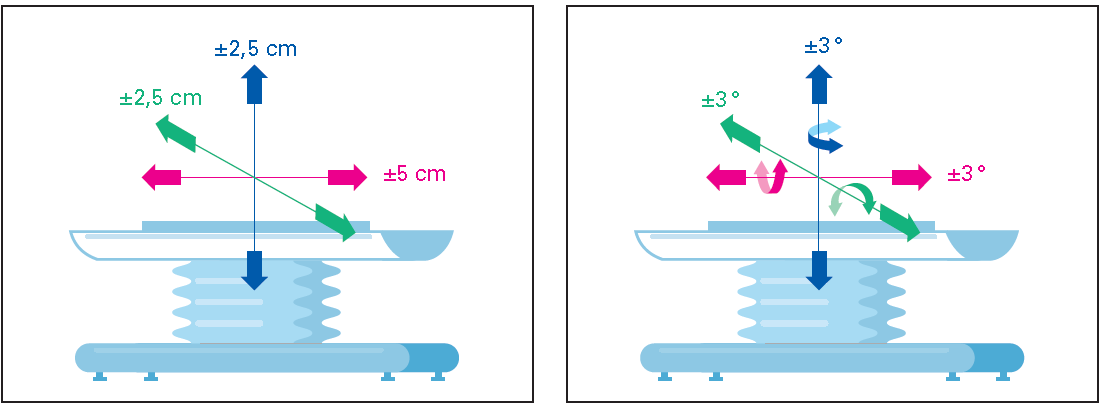
要正确地将患者定位到辐射源,需要以六个自由度移动手术台:三个线性方向(x,y,z)和三个旋转方向(θx,θy,θz)。精度比0.1mm更好,负载容量为200 kg(440磅)或更高。图片来源:PI(Physik instrumente)LP
A multi-degree, 6-axis couch can be dynamically adjusted during the radiation treatment to counter any unwanted motion, though this typically requires extremely high precision and high load capacity of >400 lb.
PI’s hexapod 6-axis parallel kinematic positioning systems confidently meet these requirements, along with a freely programmable motion of 6 degrees of freedom.
无线电治疗只有在患者和肿瘤正确放置在束上后才能开始。图片来源:PI(Physik instrumente)LP
PI的多轴运动和定位解决方案
Hexapod平行运动学设备(从希腊语中得出的六腿名称)是通过总共六个执行器(支撑杆)控制的运动平台。这些支柱在一个平台上一起起作用,促进了6个自由度的运动。
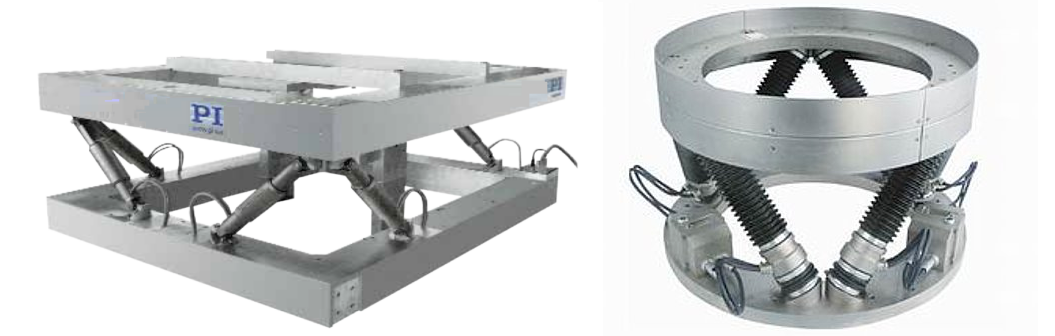
Examples of自定义六角形- 矩形六足动物设计和圆形六足设计。无论哪种情况,都位于底部和顶部框架之间的6个执行器,控制顶部平台的三个线性(x,y,z)和旋转位置(θx,θy,θy,θy,θy,θy,θy,θy,θi,θy,θz),基于六脚架运动控制器的输入。图片来源:PI(Physik instrumente)LP
PI has over 30 years of experience in the design and manufacture of a wide range of hexapod mechanisms and controllers. The company also offers hexapod-specific software, including designs for patient positioning couches.
除了大约100个标准型号外,PI还开发了许多自定义模型,满足定位,分辨率(纳米到亚毫米计),速度,尺寸,形状,成本,动态,大小和有效载荷方面的特定客户需求(来自盎司几吨)。
与传统的6轴运动系统的方法相比,Hexapods提供了一系列关键优势,包括提高准确性,更高的刚度,较低的质量和更紧凑的设计。

PI’s C-887 Hexapod Motion Controller – the 5th generation of in-house designed controllers. PI hexapod controllers provide a large amount of advanced features. All motion commands are easily programmable in Cartesian coordinates, including a virtual, user specific pivot point (center of rotation). Communication is via a number of digital interfaces, including industry standard EtherCat connectivity. Additional analog interfaces can be used for alignment sensor or force sensor feedback, and two more motor outputs can operate auxiliary positioning devices.图片来源:PI(Physik instrumente)LP
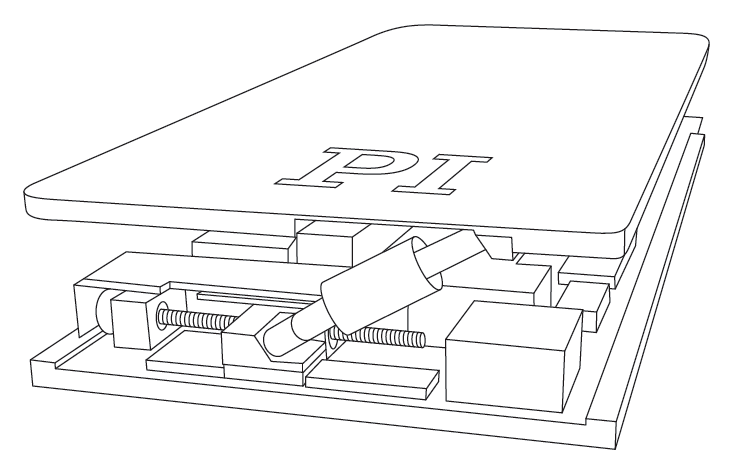
低调的6轴六链球形的基本设计,用于患者沙发。图片来源:PI(Physik instrumente)LP
六脚架理想地适合定位放疗患者,PI可以提供带有旋转,平整或线性运动的定位系统;或这些方法的任何组合。

线性运动阶段和精确执行器的示例。图片来源:PI(Physik instrumente)LP

此信息已从PI(Physik Instrumente)LP提供的材料中采购,审查和调整。亚博网站下载
For more information on this source, please visitPi(Physik instrumente)Lp。